

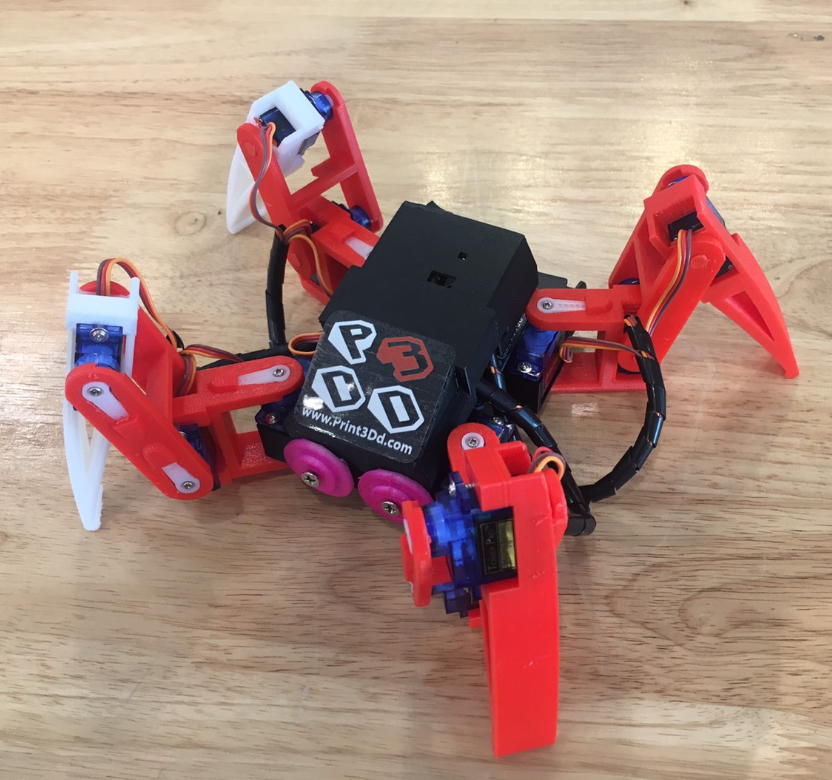
วันนี้เรามาแนะนำการสร้างหุ่นยนต์แมงมุม 4 ขาที่ สามารถสร้างโครงสร้างตัวหุ่นยนต์ได้จากเครื่องพิมพ์ 3 มิติในที่นี้ทางเราได้ใช้เครื่องพิมพ์ 3 มิติ รุ่น FlashForge Guider IIs
เราจะมาแนะนำการใช้เครื่องพิมพ์ 3 มิติที่ใช้พิมพ์ในส่วนที่เราได้ทำการสร้างนั้นอาทิเช่น ลำตัว แขน ขา เป็นต้น ในส่วนของหุ่นยนต์แมงมุมนั้นเราได้นำไฟล์มาจาก www.thingiverse.com ซึ่งจะเป็นเว็ปไซต์ที่มีผู้ใช้งานและนักออกแบบอยู่ทั่วโลกมาแชร์ความรู้ แชร์ไฟล์มาให้เข้าเยี่ยมชมเว็ปไซต์และสามารถดาวน์โหลดเพื่อนำไปต่อยอดได้ ในส่วนของหุ่นยนต์แมงมุม 4 ขาที่ทางเราได้สร้างขึ้นมานั้นจะมีเพียงแค่ส่วนของตัวโครงสร้างและโปรแกรมที่ควบคุมตัวหุ่นยนต์ที่เราได้ใช้ตามผู้ออกแบบ ส่วนของบอร์ดควบคุมนั้นทางเราได้ใช้บอร์ดควบคุมที่แตกต่างจากผู้ออกแบบเนื่องจากบอร์ดที่ทางเราใช้สามารถหาซื้อได้ตามท้องตลาดภายในประเทศ ซึ่งโดยรวมแล้วสามารถใช้ได้ตามต้นแบบ
Spider Robotics สามารถนำไปเป็นต้นแบบของหุ่นยนต์สี่ขาเพื่อใช้ในการศึกษาและเรียนรู้เกี่ยวกับการออกแบบ การเขียนโปรแกรม ยังสามารถต่อยอดไปใช้ในงานอุตสาหกรรม อาทิ เช่น หุ่นยนต์ตรวจตรา หุ่นยนต์ช่วยเหลือ ในส่วนของตัวหุ่นยนต์นั้นจำเป็นอย่างมากที่จะต้องมีโครงสร้างซึ่งโครงสร้างสามารถสร้างได้จากเครื่องพิมพ์ 3 มิติ ในที่นี้เราจะมาบอกรายละเอียดของส่วนประกอบต่างๆ ของตัวแมงมุมซึ่งทางเราใช้เครื่องพิมพ์ 3 มิติ รุ่น FlashForge Guider IIs ตัวเครื่องพิมพ์สามารถพิมพ์รายละเอียดได้ดีมากและ ผนวกเข้ากับบอร์ดควบคุมได้ เรามาเริ่มดูขั้นตอนการทำกันเลยครับ
สามารถดาวน์โหลดไฟล์หุ่นยนต์แมงมุม 4 ขาได้ตามลิงค์ https://www.thingiverse.com/thing:2901132
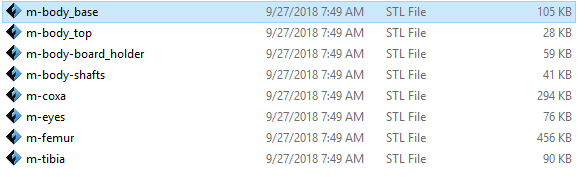
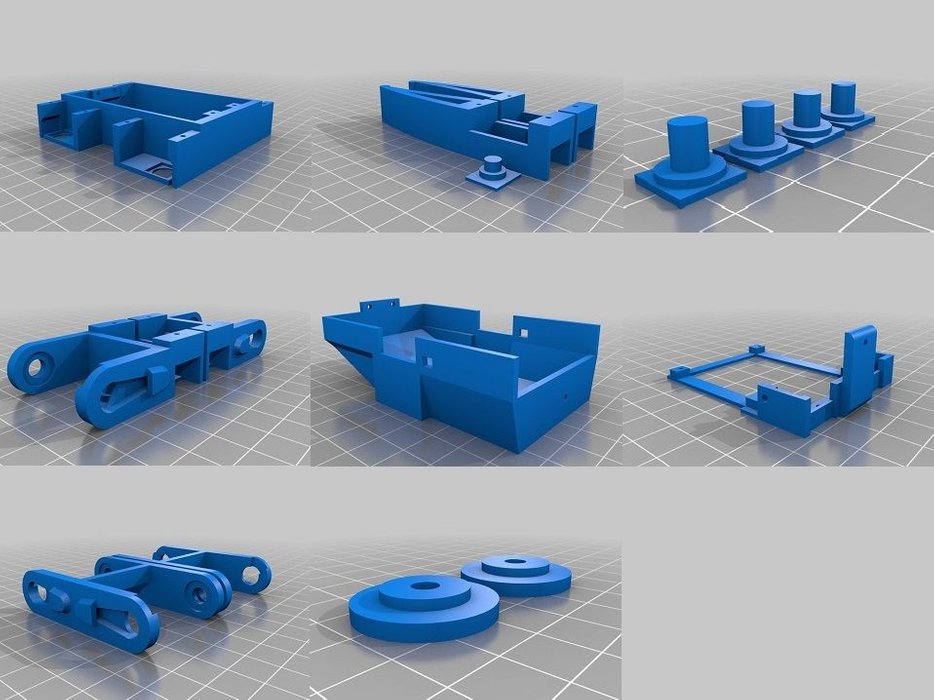
ภาพที่ 1 แสดงไฟล์ส่วนโครงสร้างของตัวหุ่นยนต์แมงมุม 4 ขา
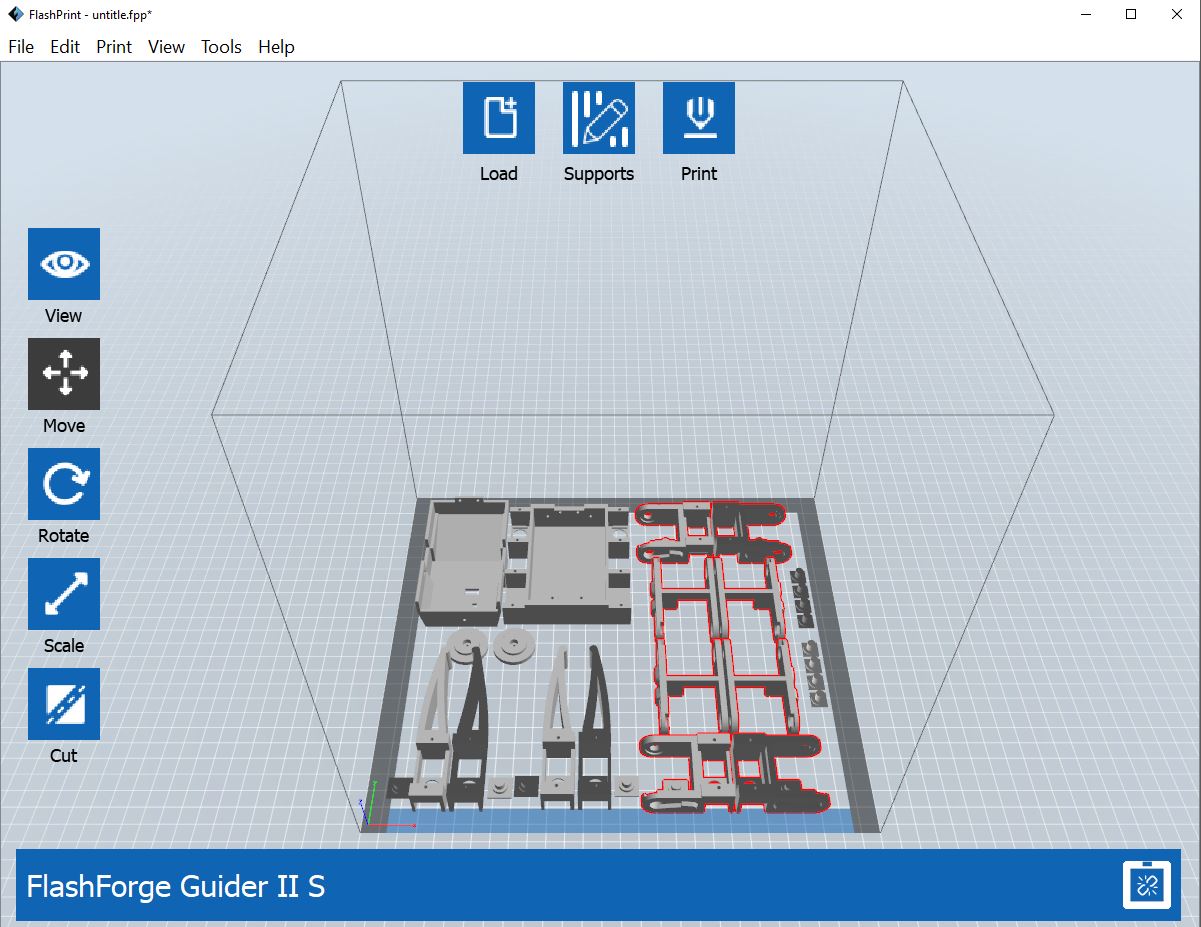
ภาพที่ 2 แสดงชิ้นส่วนโครงสร้างของตัวหุ่นยนต์แมงมุม 4 ขา ภายในโปรแกรม FlashPrint
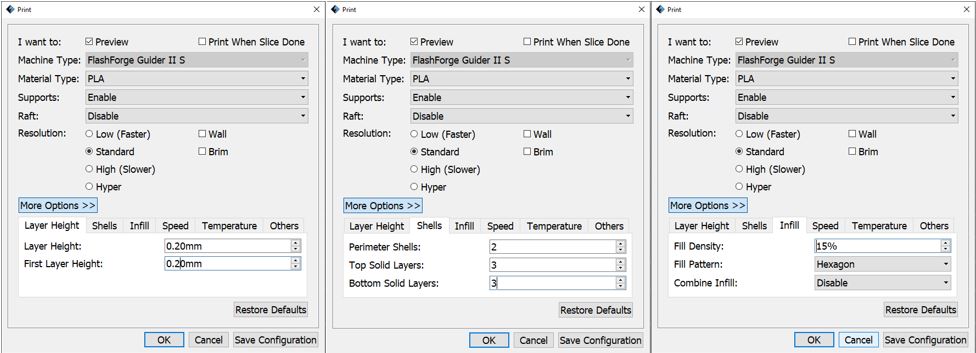
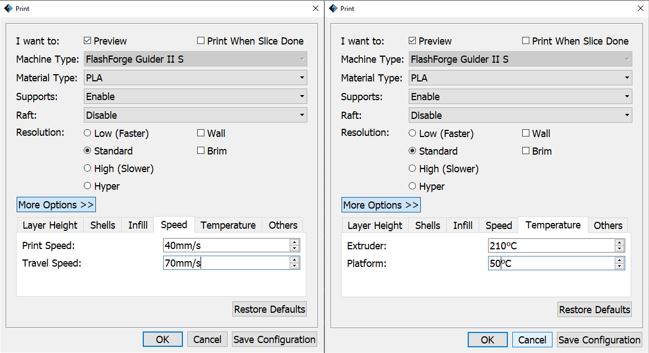
ภาพที่ 3 แสดงการตั้งค่าความละเอียดก่อนทำการพิมพ์ขึ้นรูป 3 มิติ
วีดีโอที่ 1 แสดงการทำงานของเครื่องพิมพ์ Guider IIs
รายการอุปกรณ์ที่ใช้
1. 18650 Battery พร้อมรางถ่านเดี่ยว : 1 ชุด
2. Arduino Nano Expansion Shield : 1 บอร์ด
3. Arduino Nano Shield : 1 บอร์ด
4. SG90 Micro Servo Motor : 12 ตัว
5. สายไฟ สายแพรจั๊ม Bread Board : 1 แพ็ค
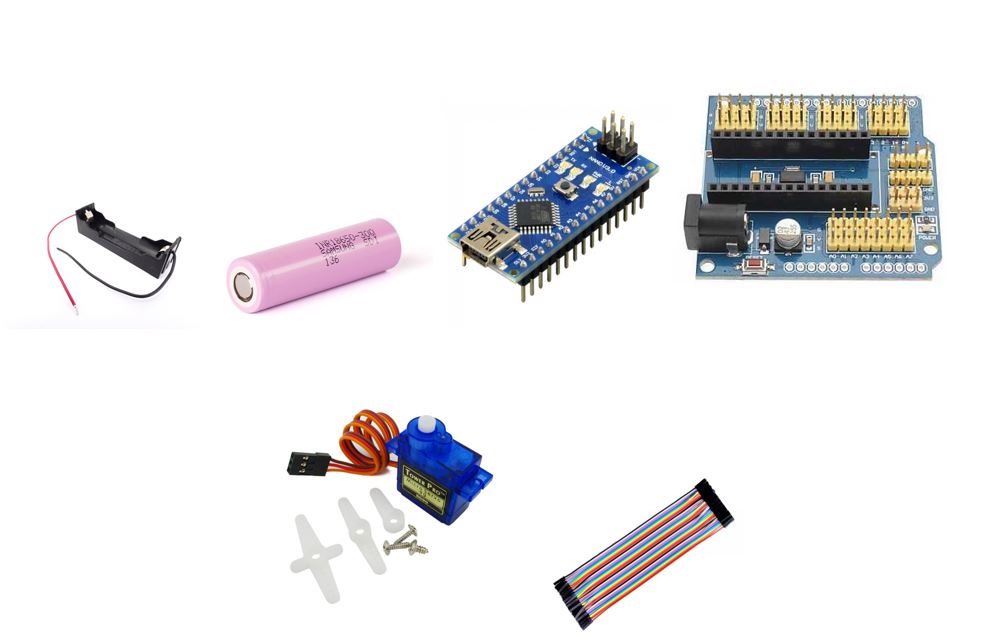
ภาพที่ 4 แสดงตัวอย่างอุปกรณ์ที่ใช้ประกอบทำหุ่นยนต์แมงมุม 4 ขา
- ขั้นตอนต่อไปหลังจากที่เตรียมอุปกรณ์ทั้งหมดเสร็จเรียบร้อยแล้วก็ทำการประกอบตัวหุ่นยนต์ให้เป็นรูปเป็นร่างกันครับ
วีดีโอที่ 2 แสดงการประกอบบอร์ดควบคุมและ Servo Motor ที่ตัวหุ่นยนต์
*ข้อสังเกตุ* จะเห็นได้ว่าบอร์ดที่เราใช้นั้นไม่เหมือนกับผู้ออกแบบจึงต้องมีการดัดแปลงของโครงสร้างเล็กน้อยและทำการอัพโหลดโปรแกรมเข้าไปยังบอร์ดควบคุม Arduino Nano ก่อนทำการติดตั้ง
ดาวน์โหลดไฟล์ Arduino เพื่ออัพโหลดโปรแกรมไปยังบอร์ดควบคุมสำหรับหุ่นยนต์แมงมุม 4 ขาได้ตามลิงค์นี้ครับ https://github.com/manic-3dprint/ez-arduino-spidey
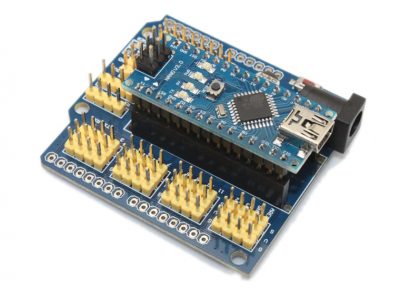
ภาพที่ 5 แสดงภาพการประกอบบอร์ดควบคุมทั้ง 2 ตัวเข้าด้วยกันจะได้ดังภาพและ ทำการติดตั้งบอร์ดควบคุมนี้ลงไปที่ตัวโครงสร้างแทนบอร์ดสีเขียวของผู้ออกแบบใน วีดีโอที่ 2
วีดีโอที่ 3 แสดงการประกอบ Servo Motor ตามแขนและขาของหุ่นยนต์และนำมาประกอบรวมกันกับตัวหุ่นยนต์
วีดีโอที่ 4 แสดงการติดตั้งสายไฟ Servo Motor เข้ากับบอร์ดควบคุม
- ลำดับการติดตั้ง Servo Motor เข้ากับบอร์ดควบคุม
D2 ต่อกับ กระดูกต้นขาด้านขวาหน้า
D3 ต่อกับ กระดูกด้านหน้าแข้งขวา
D4 ต่อกับ กระดูกด้านหน้าสะโพกขวา
D5 ต่อกับ กระดูกต้นขาด้านขวาหลัง
D6 ต่อกับ กระดูกด้านหลังแข้งขวา
D7 ต่อกับ กระดูกด้านหลังสะโพกขวา
D8 ต่อกับ กระดูกต้นขาด้านซ้ายหน้า
D9 ต่อกับ กระดูกด้านหน้าแข้งซ้าย
D10 ต่อกับ กระดูกด้านหน้าสะโพกซ้าย
D11 ต่อกับ กระดูกต้นขาด้านซ้ายหลัง
D12 ต่อกับ กระดูกด้านหลังแข้งซ้าย
D13 ต่อกับ กระดูกด้านหลังสะโพกซ้าย
วีดีโอที่ 4 แสดงขั้นตอนการต่อสายที่ A5 เข้ากับ 3.3V ก่อนเริ่มต้นการ Caribrate Servo Motor หลังจากต่อสายเสร็จเรียบร้อยแล้วทำการจ่ายไฟให้กับตัววงจรควบคุมที่ 5V และ GND
วีดีโอที่ 5 แสดงขั้นตอนการ Caribrate Servo Motor คือการตั้งค่าเริ่มต้นของ Servo Motor เข้ากับชุดโครงสร้างตัวและแขนขาของหุ่นยนต์เมื่อทำการตั้งค่าเสร็จแล้วก็ให้นำสายที่ต่อระหว่าง A5 และ 3.3 V ออก
ทำการติดสวิตซ์ให้กับตัวหุ่นยนต์เพียงเท่านี้ก็เป็นอันเสร็จเรียบร้อยแล้วครับ
วีดีโอที่ 5 แสดงขั้นตอนการติดสวิตซ์และประกอบก่อนเริ่มทำงาน
วีดีโอที่ 6 แสดงการใส่ Battery 18650 และการทำงานของหุ่นยนต์แมงมุม 4 ขา
ซึ่งสามารถนำไปต่อยอดบังคับผ่านแอพพลิเคชั่นในมือถือหรือรีโมทคอนโทรลได้นะครับ
ติดตามเทคโนโลยีและความรู้ใหม่ได้ที่ www.print3dd.com