Description
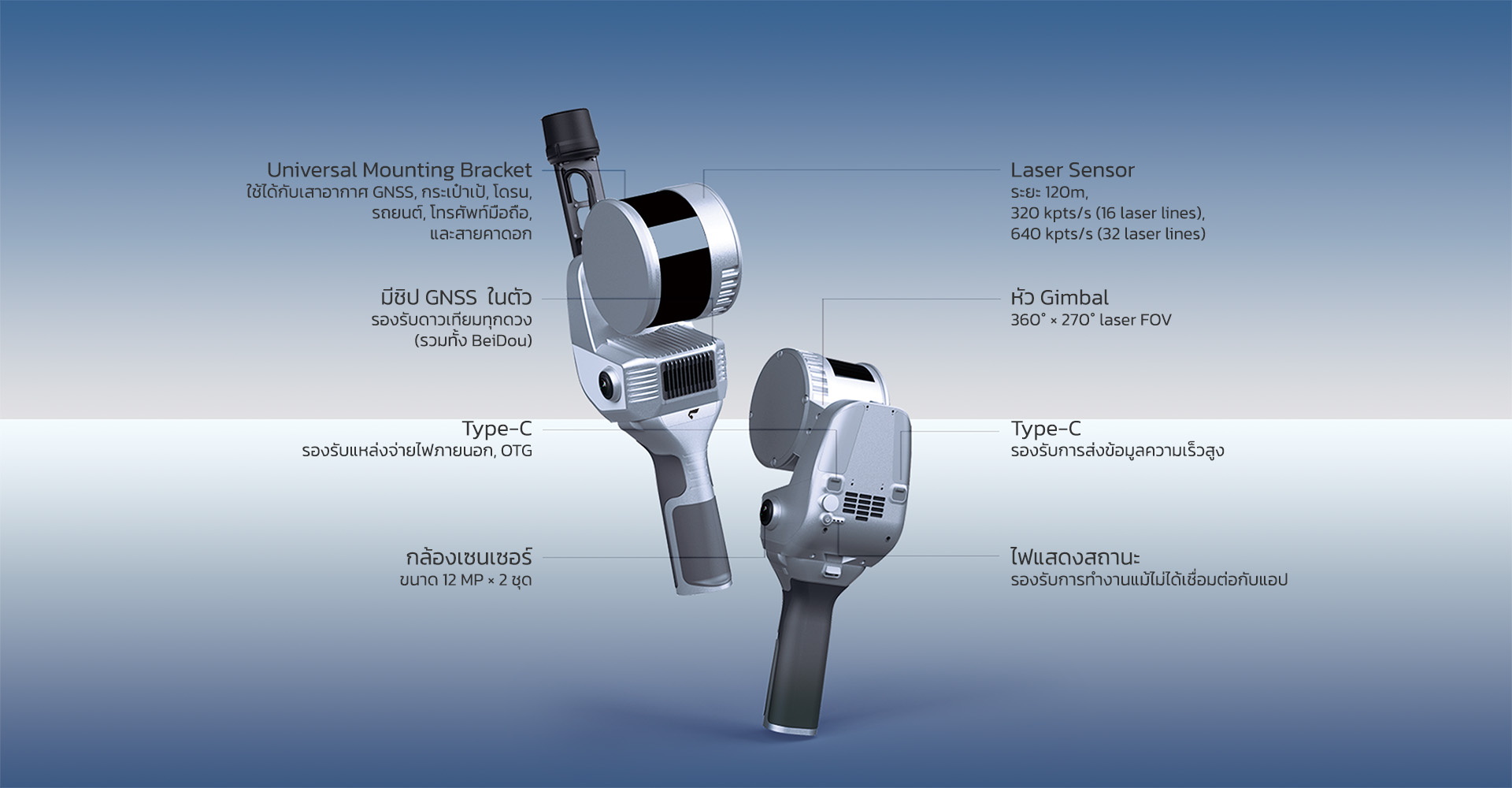
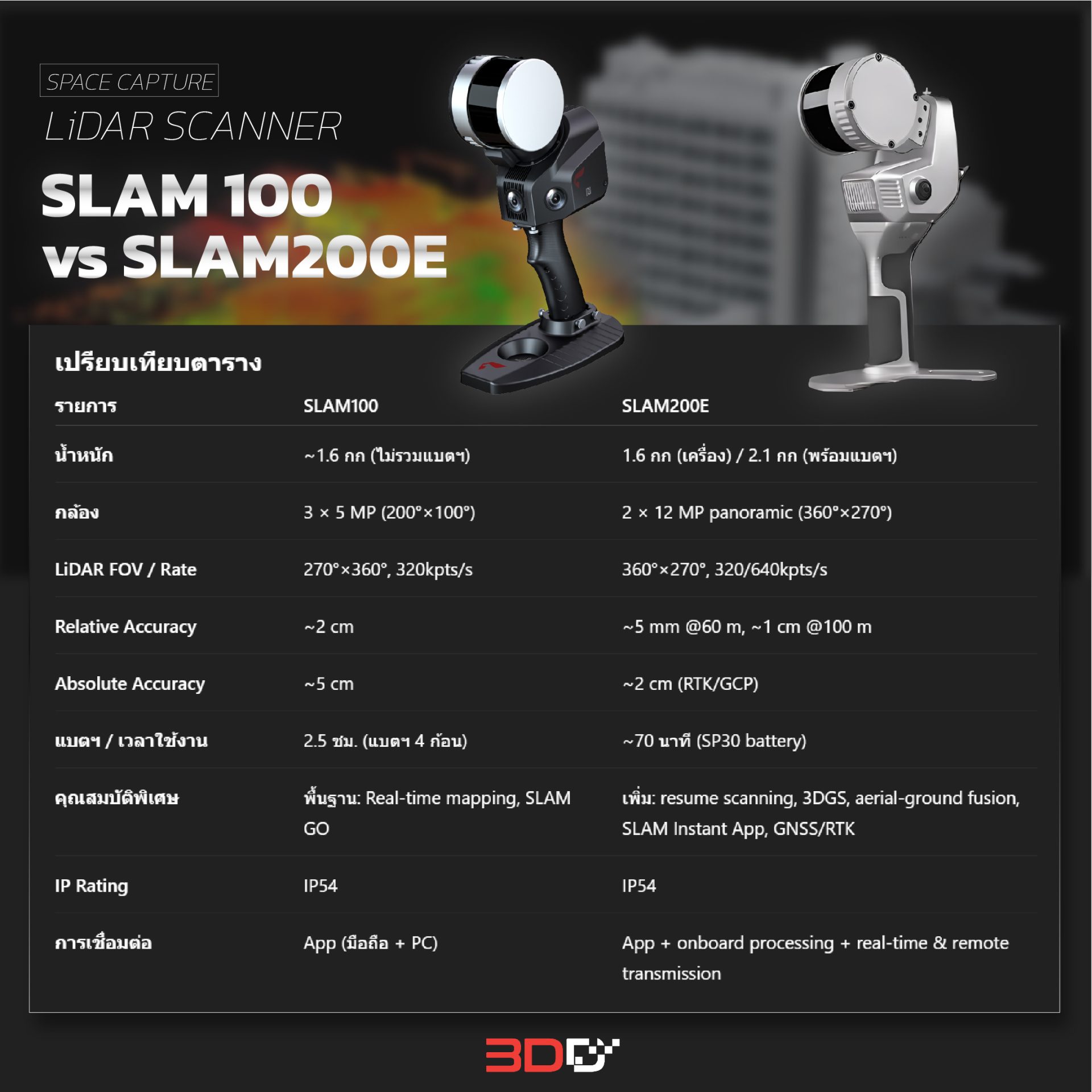
SLAM200E เป็นสแกนเนอร์มือถือชนิดเลเซอร์ ที่มีความแม่นยำสูง ความสามารถสูง และประสิทธิภาพสูง มันผสานความเป็นเลิศของ SLAM100 และ SLAM200 เข้าด้วยกัน พร้อมด้วยเซนเซอร์ LiDAR ความถี่สูง กล้องคู่ขนาด 12MP พาโนรามา ติดตั้งโมดูล GNSS ความแม่นยำสูงมาในตัว และยังประกอบด้วยหน่วยประมวลผลภายในเครื่องอีกด้วย SLAM200E ให้ประสบการณ์ที่เหนือกว่าในการจัดเก็บและประมวลผลข้อมูลเชิงพื้นที่ (Spatial data acquisition)
SLAM200E ยังเป็นอุปกรณ์จัดทำแผนที่เคลื่อนที่ระดับอาชีพที่สามารถทำแผนที่ได้อย่างละเอียดแม่นยำ แม้ในบริเวณที่ GNSS ถูกจำกัดไว้ ด้วยระบบคอมพิวเตอร์ที่บรรจุอยู่ในเครื่อง ทำให้การประมวลผลข้อมูลแบบเรียลไทม์ สามารถทำการเก็บข้อมูล ทำแผนที่ และการลงสีเป็นไปได้ในเวลาเดียวกัน เมื่อติดตั้งอุปกรณ์ RTK ก็จะสามารถเก็บข้อมูลพิกัดแบบสัมบูรณ์ (Absolute Coordinate System) ในทันที นอกจากนี้ SLAM200E ยังมีฟีเจอร์ที่พัฒนาขึ้นมาโดยเฉพาะอีกหลายอย่าง เช่น Breakpoint resume feature for interrupted scans, point cloud fusion for scan gaps, high-fidelity 3DGS reconstruction และ SLAM Instant App ใหม่ล่าสุด ซึ่งช่วยให้สามารถทำแผนที่ได้ทันทีเมื่อสแกนเสร็จ เหมาะสำหรับระดับอุตสาหกรรมที่ต้องการการรายงานภาคสนามอย่างรวดเร็ว และประสิทธิภาพการทำงานที่เพิ่มขึ้น
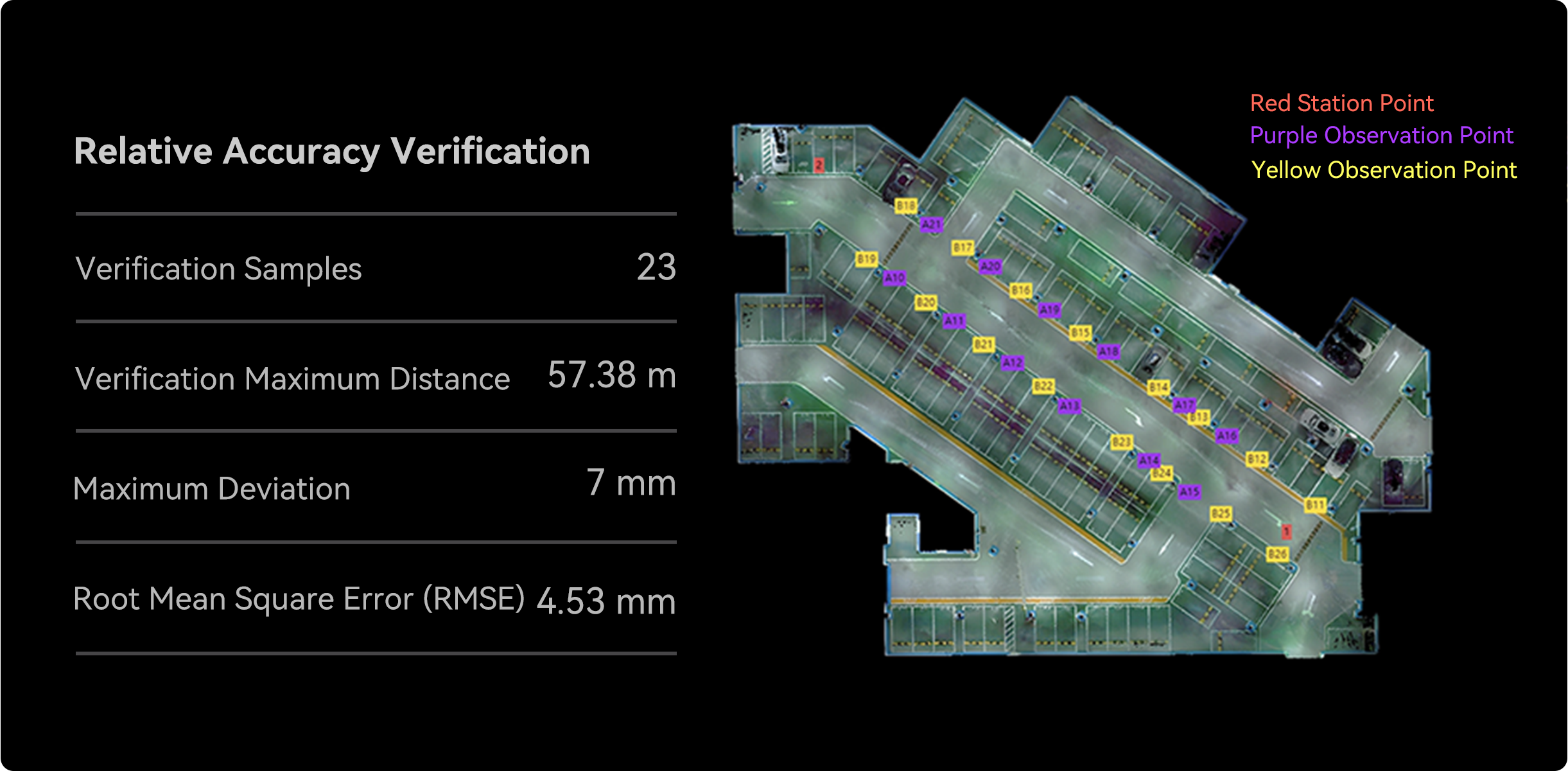
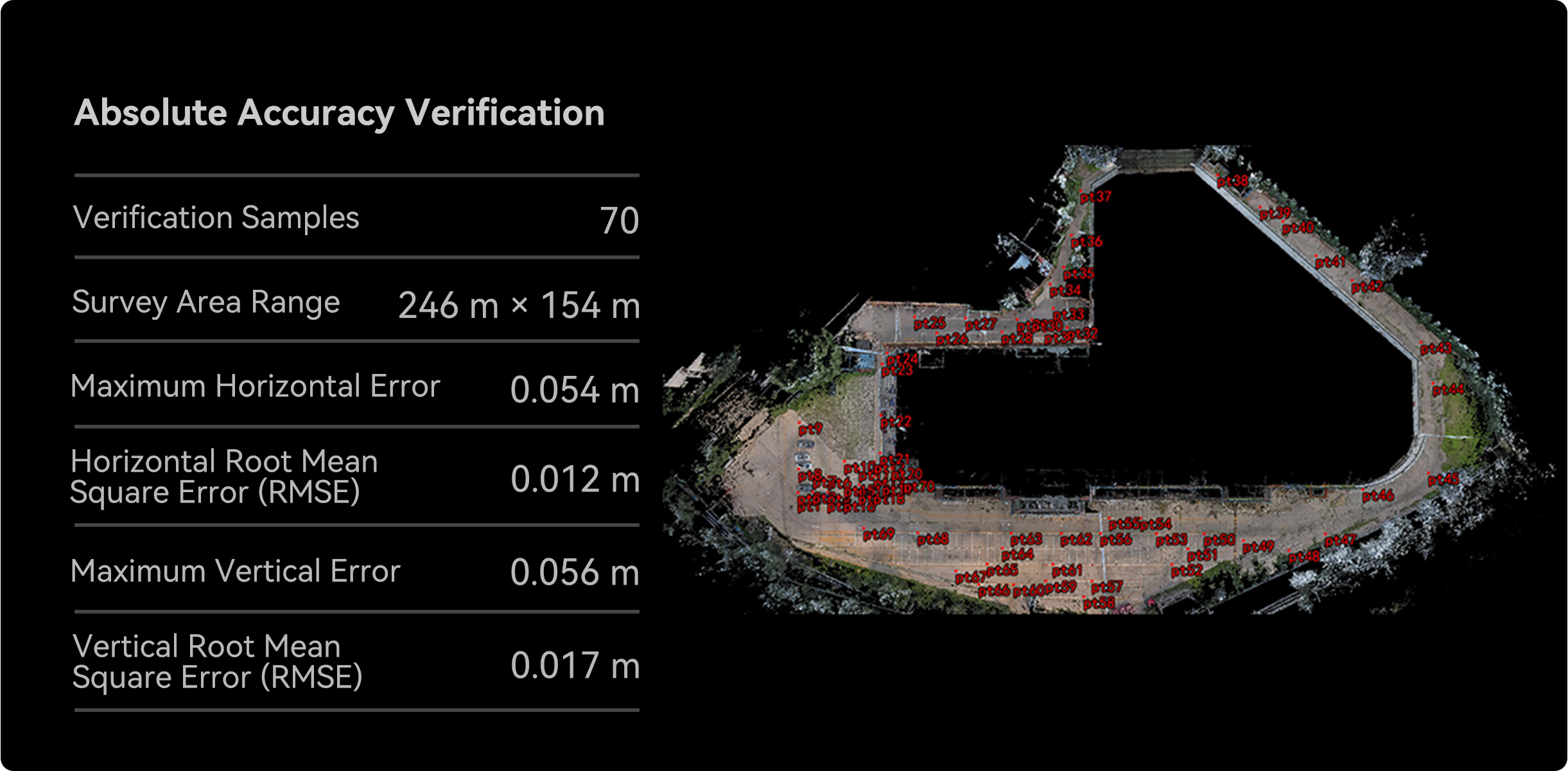
การวัดขนาดที่แม่นยำสูงเป็นพิเศษภายในช่วงมิลลิเมตรเท่านั้น
SLAM200E เป็นเครื่องมือทำแผนที่เคลื่อนที่ความแม่นยำสูงระดับมืออาชีพ รองรับความแม่นยำสัมพัทธ์ 5 มม. ในระยะ 60 เมตร และ 1 ซม. ในระยะ 100 เมตร เมื่อเชื่อมต่อกับโมดูล RTK หรือผสานกับ GCP จะสามารถให้ความแม่นยำสัมบูรณ์สูงสุด 2 ซม.
การทำแผนที่แบบเรียลไทม์ด้วยพิกัดอ้างอิงสัมบูรณ์
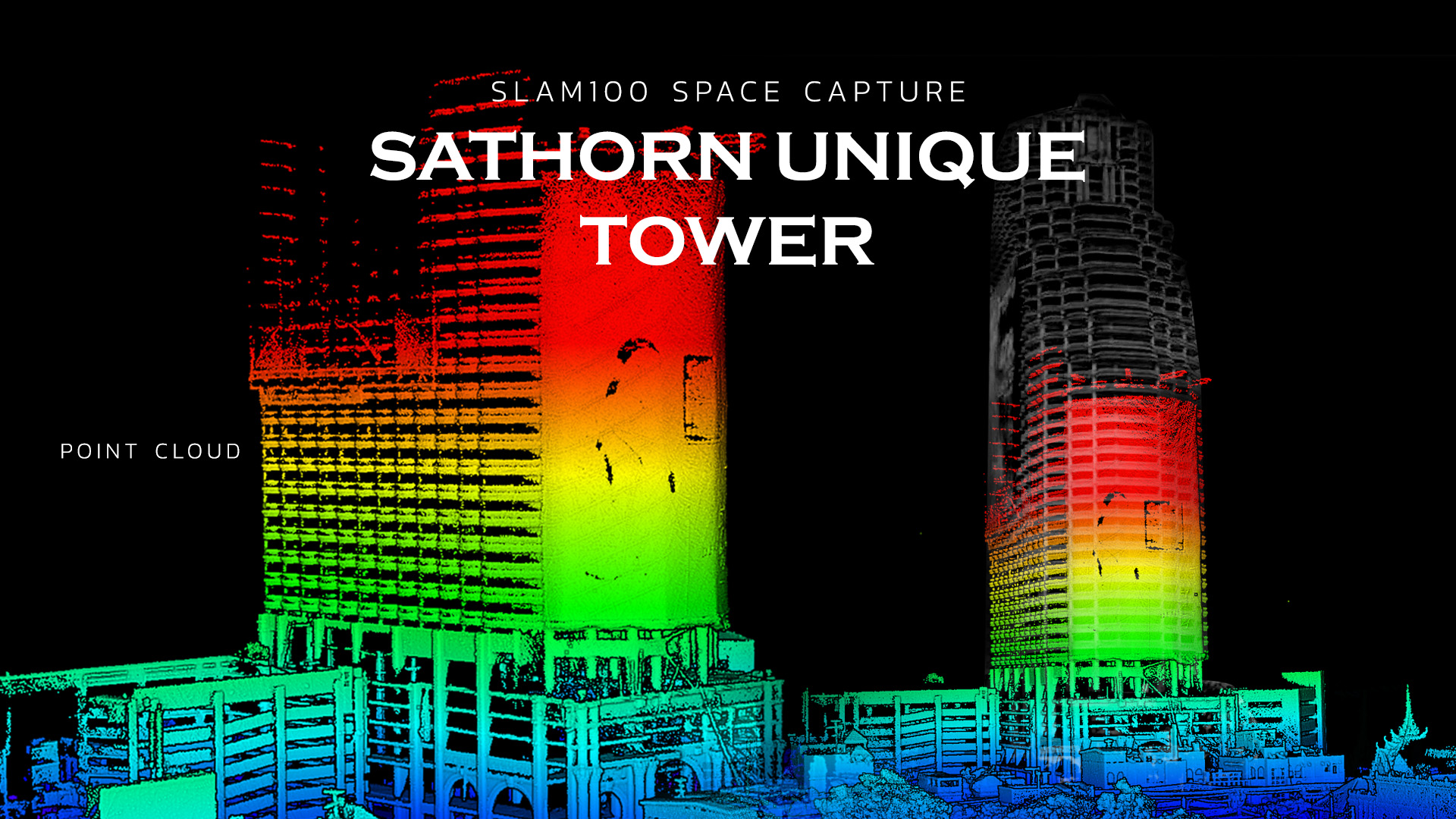
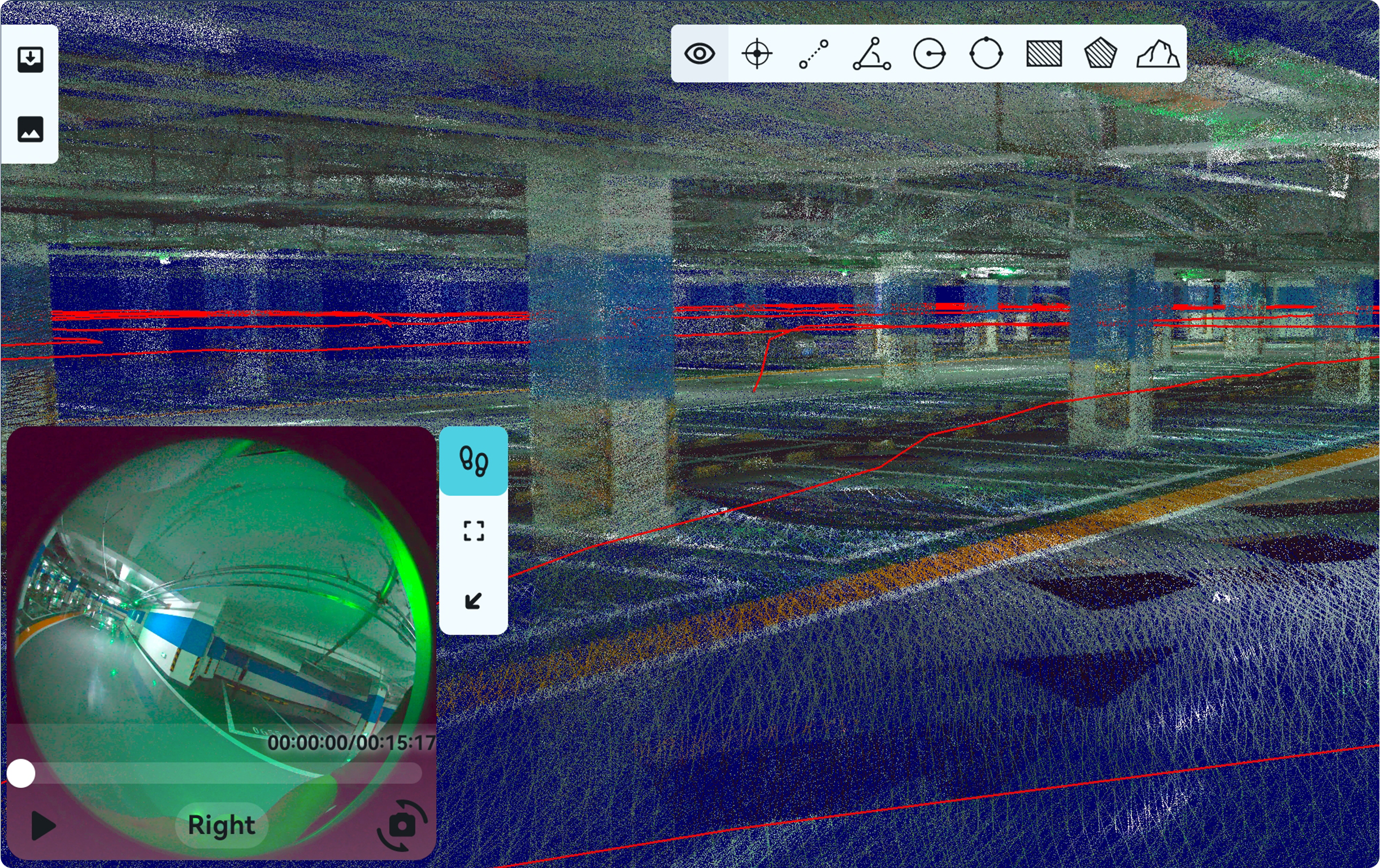
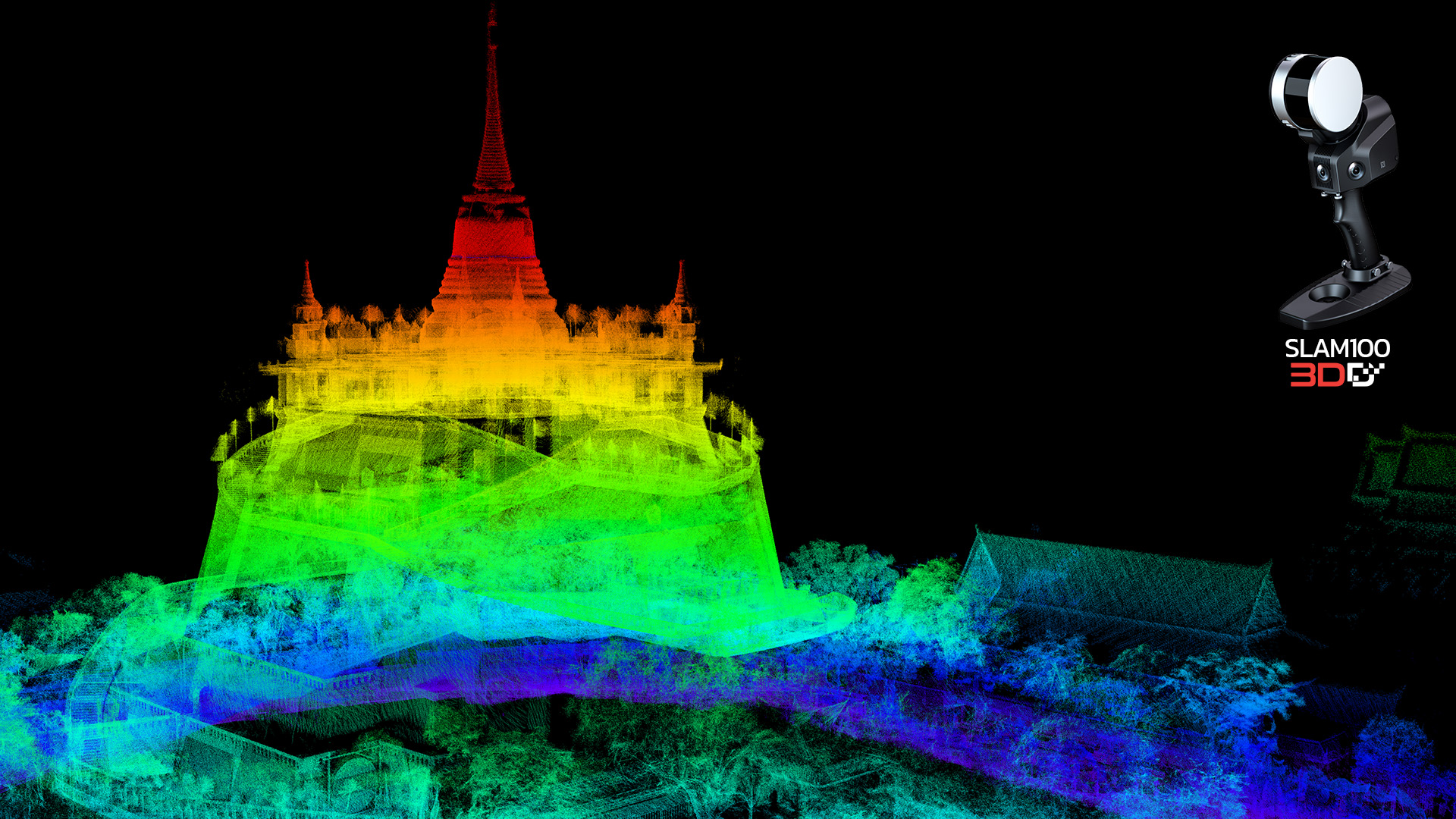
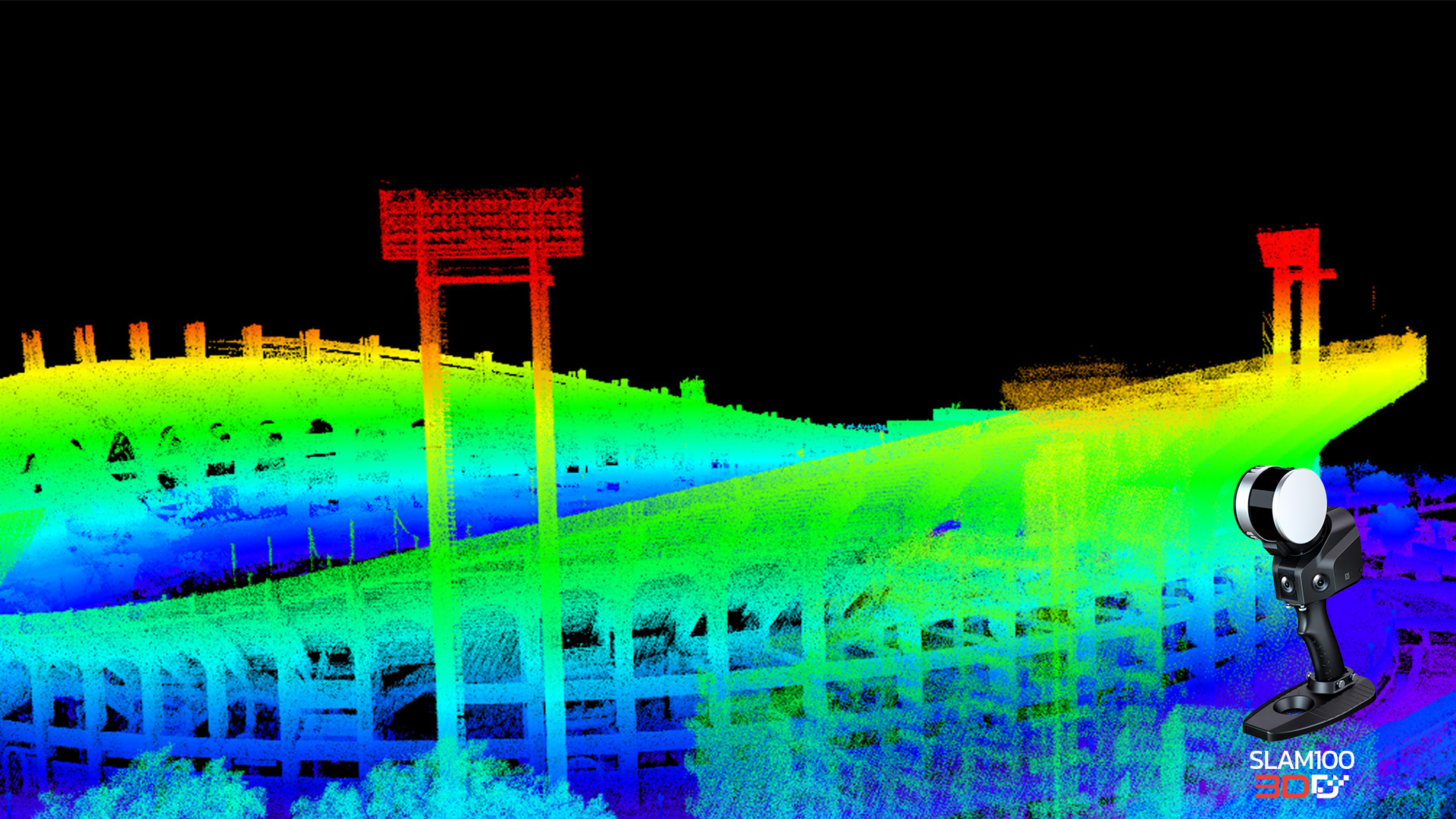
SLAM200E บันทึกและแสดงภาพพ้อยท์คลาวด์สีแบบเรียลไทม์ที่มีความแม่นยำสูง ให้ผลลัพธ์ที่เข้าใจง่ายและครอบคลุม เมื่อเชื่อมต่อกับ RTK เครื่องจะแสดงผลพ้อยท์คลาวด์อ้างอิงทางภูมิศาสตร์พร้อมพิกัดสัมบูรณ์โดยตรง ช่วยเพิ่มประสิทธิภาพการทำงานอย่างมีนัยสำคัญ ช่วยให้สามารถบันทึกพ้อยท์คลาวด์แบบเรียลไทม์ได้ในสถานการณ์การใช้งานทั่วไปส่วนใหญ่ ซึ่งรวมถึงแต่ไม่จำกัดเพียงการสำรวจเมือง การตรวจสอบทางวิศวกรรม และสาขาที่เกี่ยวข้อง ซึ่งช่วยลดขั้นตอนการทำงานหลังการประมวลผลลงอย่างมาก
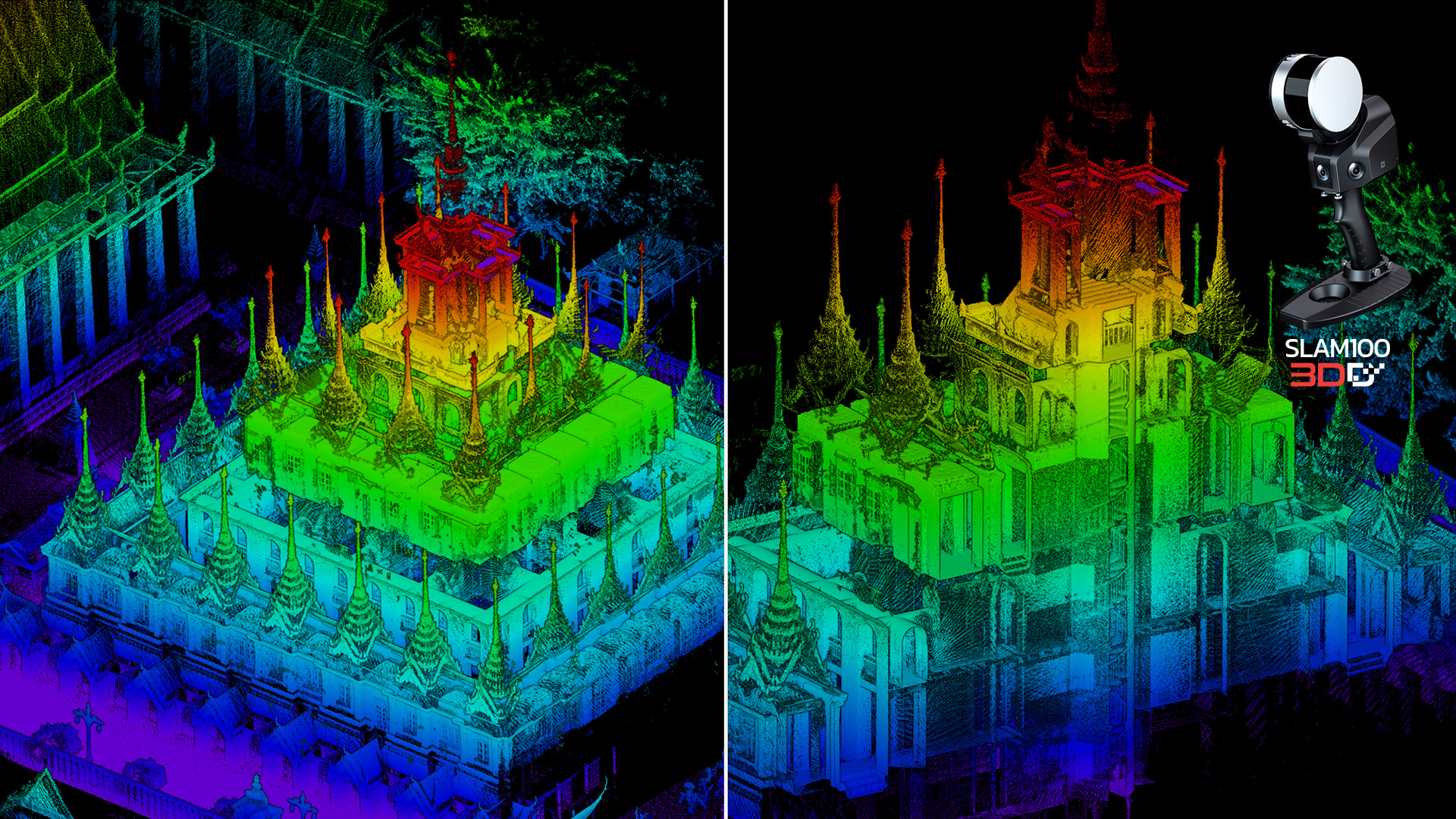
Post-processing / Real-time Colored Point Cloud
Details of Real-time Point Cloud / Post-processing Point Cloud
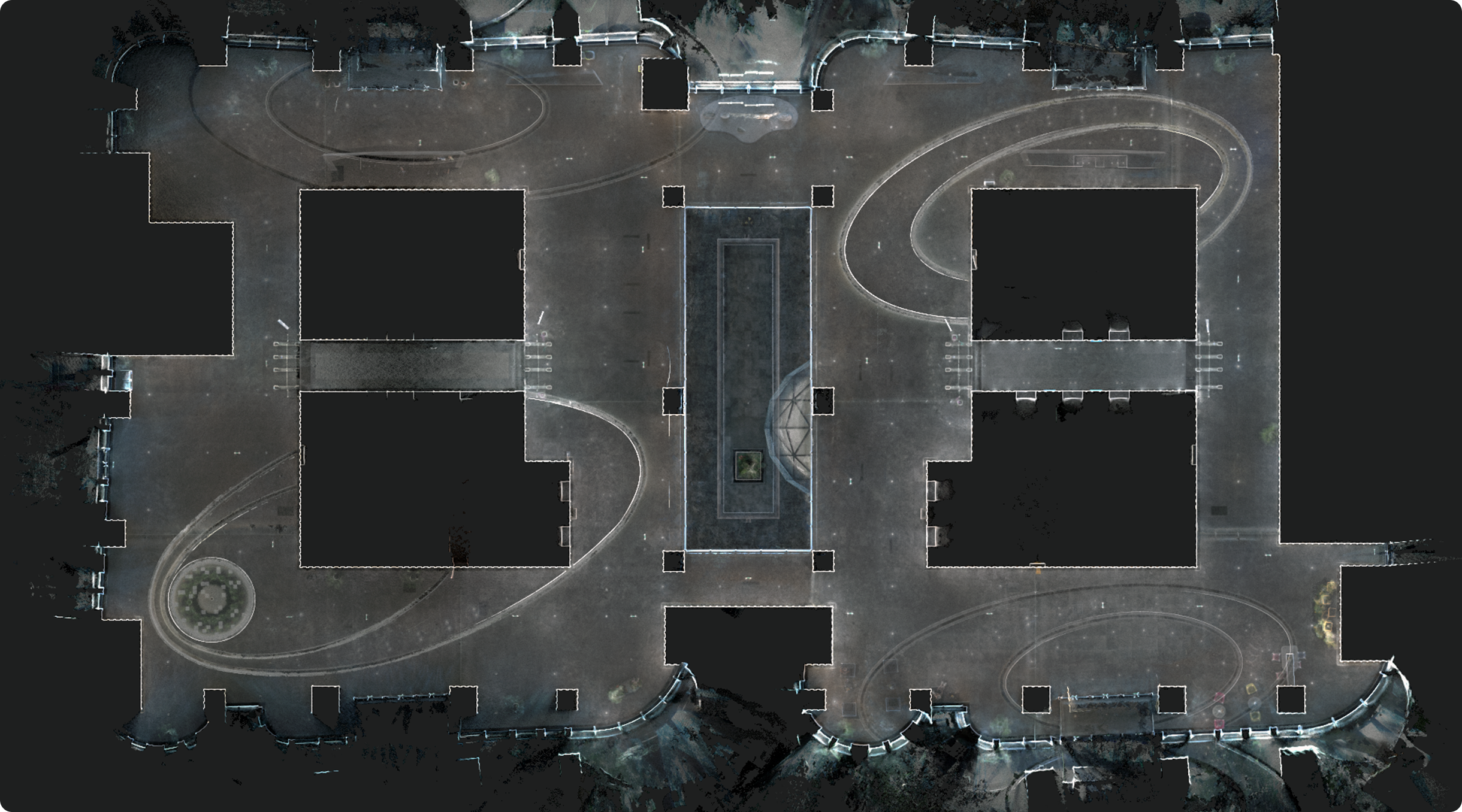
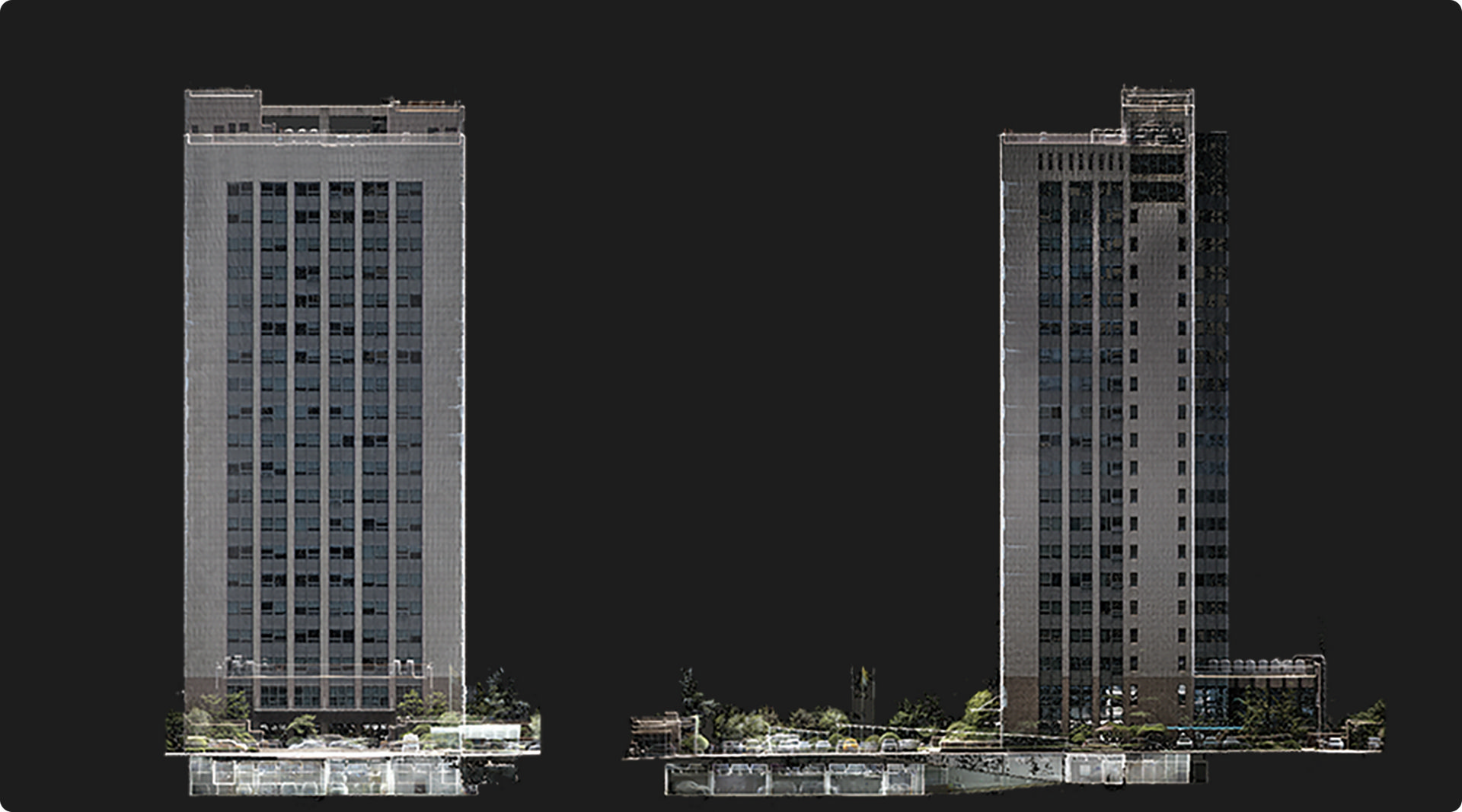
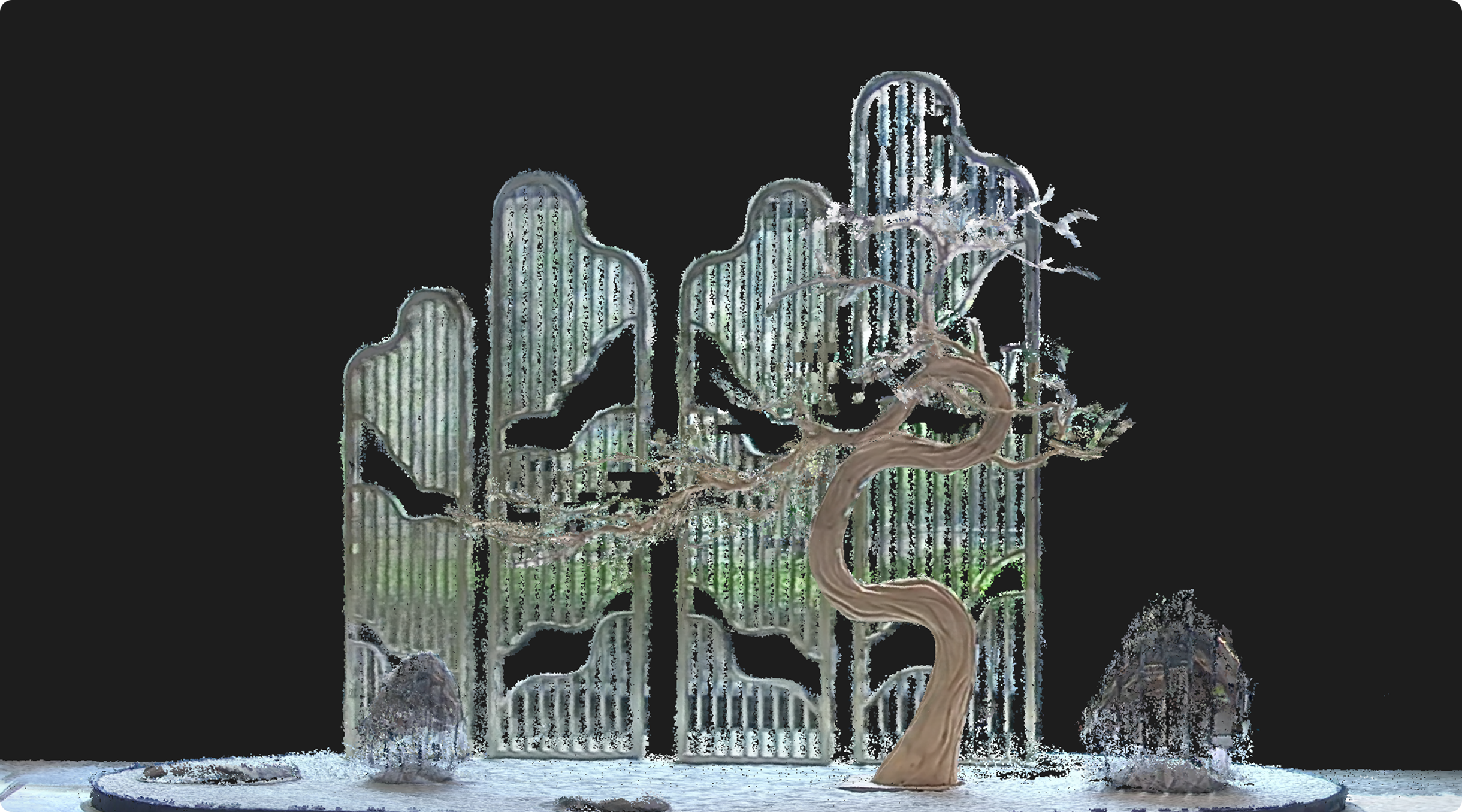
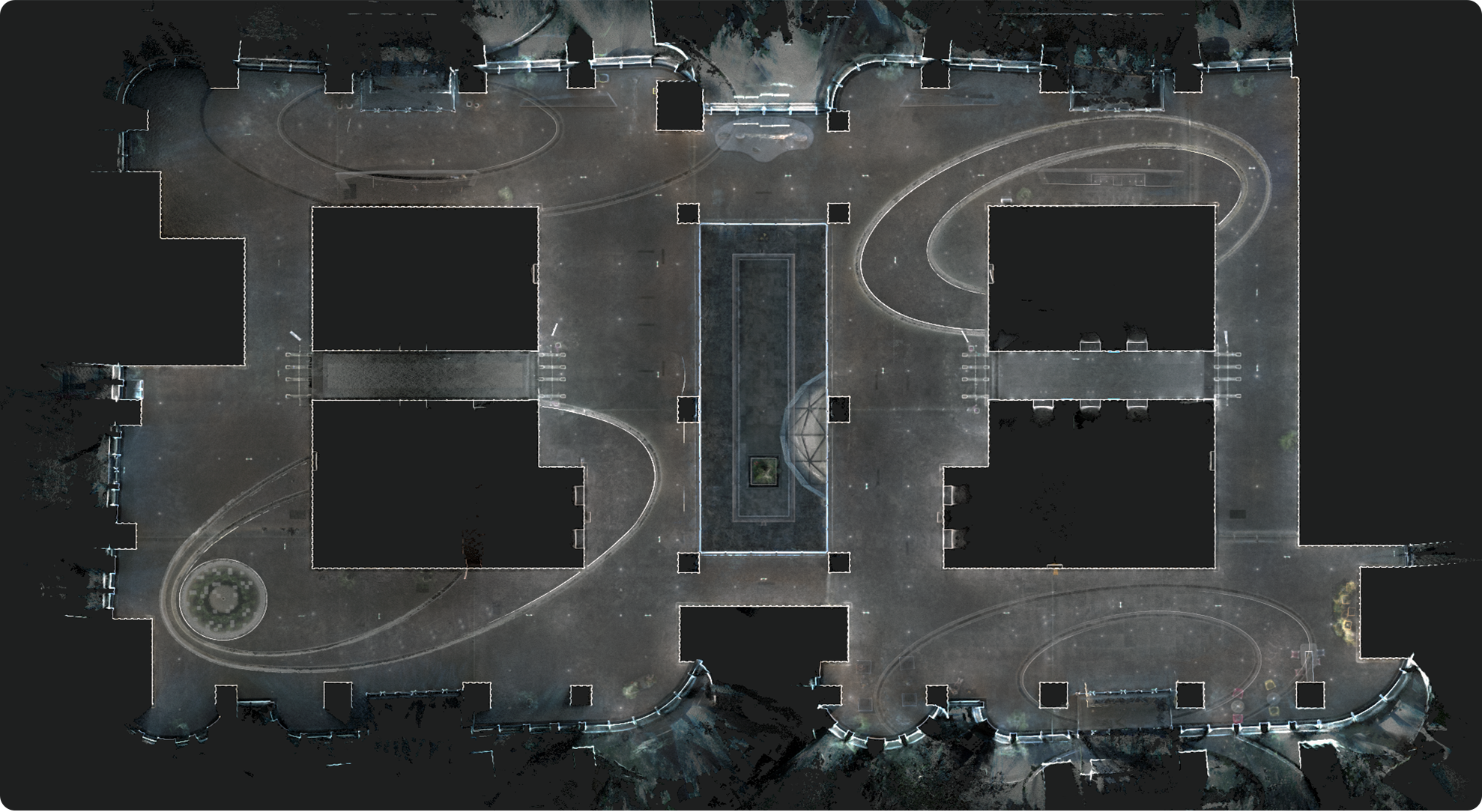
การสร้างฉาก 3 มิติที่มีความแม่นยำสูง
ด้วยการบูรณาการกลุ่มพ้อยท์คลาวด์ที่มีความแม่นยำสูง รวมกับภาพพื้นผิวที่มีความละเอียดสูง SLAM200E สามารถสร้างฉาก 3 มิติขึ้นมาใหม่ได้อย่างสมจริง ตอบสนองความต้องการในการรวบรวมข้อมูล 3 มิติที่เข้มข้นสำหรับการใช้งานต่างๆ เช่น อุตสาหกรรมดิจิทัล ห้องโถงจัดนิทรรศการดิจิทัล BIM และสถานการณ์อื่นๆ ที่ต้องใช้การสร้างแบบจำลองที่แม่นยำ
- High Density
การผสานรวมกล้องพาโนรามาเพื่อการใช้งานขั้นสูง
กล้องพาโนรามาคู่ความละเอียด 12 เมกะพิกเซล บันทึกภาพมุมมองภาพกว้าง 360° และรายละเอียดพื้นผิวที่ละเอียด สร้างสรรค์ภาพกลุ่มพ้อยท์คลาวด์สี และภาพพาโนรามาที่สมจริงยิ่งขึ้น ข้อมูลจากกล้องพาโนรามารองรับการทำงานต่างๆ มากมาย อาทิ การลงสีพ้อยท์คลาวด์, Visual SLAM, การสร้างภาพพาโนรามา, การทำแผนที่ 3 มิติ และ Gaussian Splatting
|
|
|
Visual SLAM |
|
|
|
|
|
|




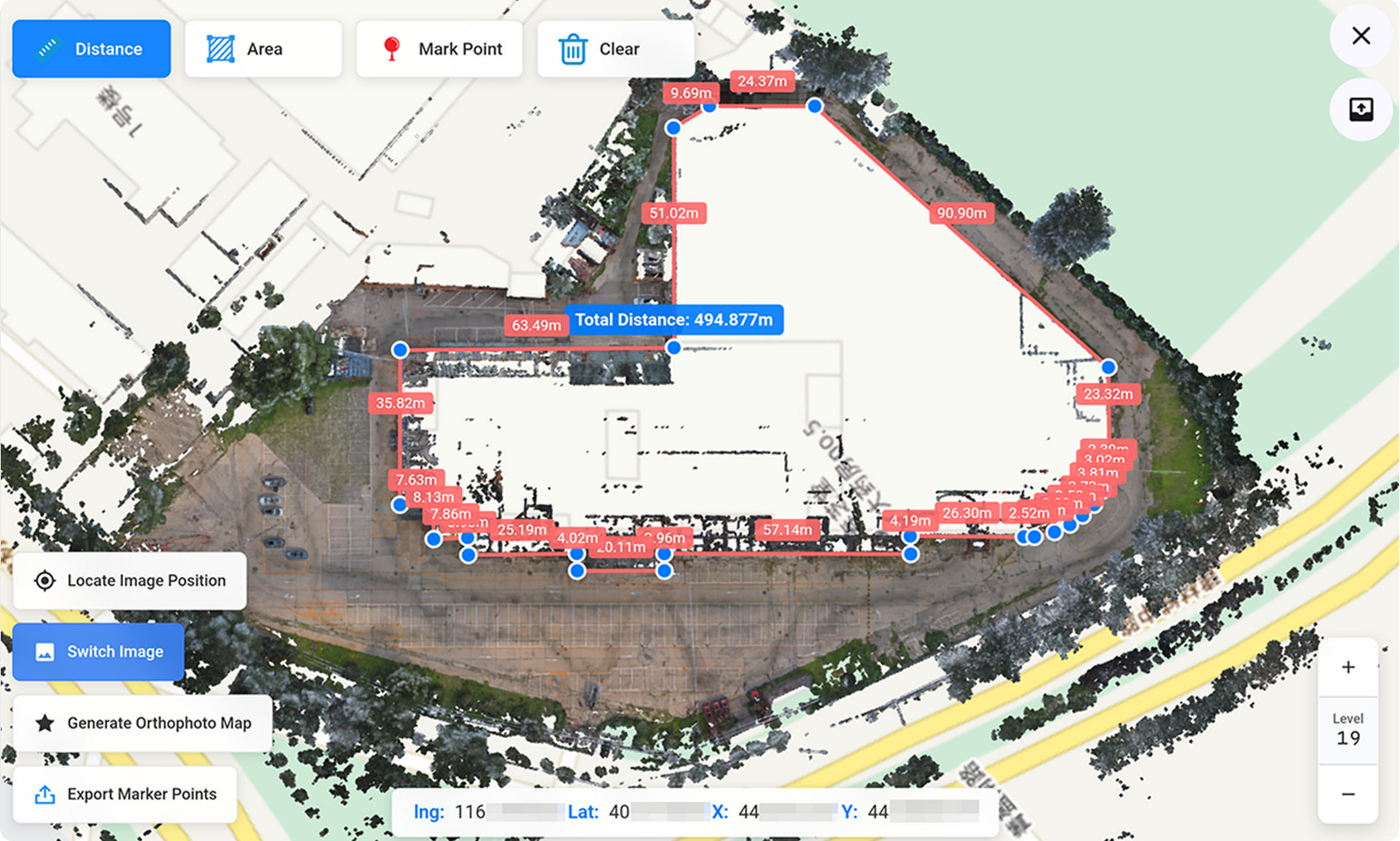
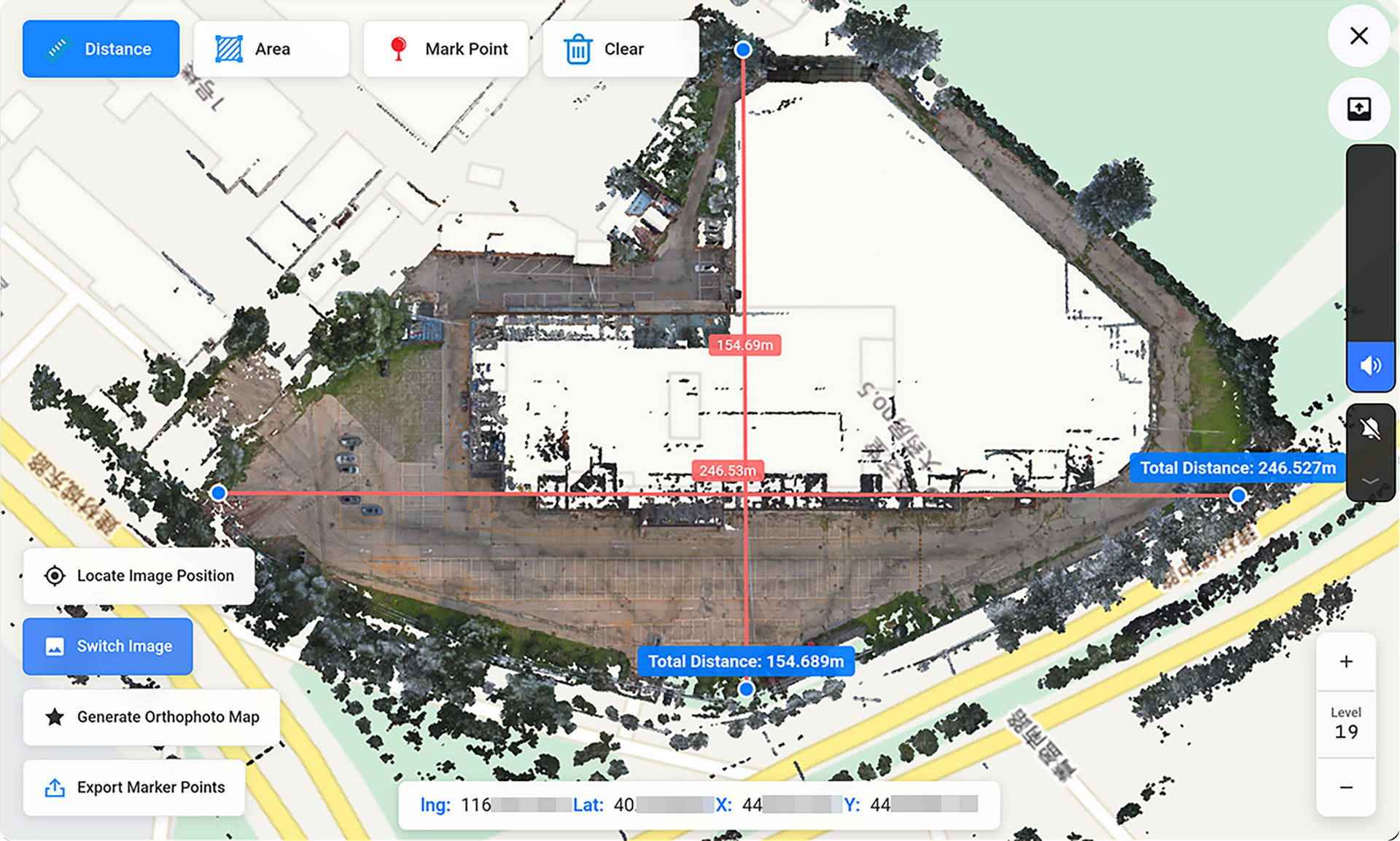
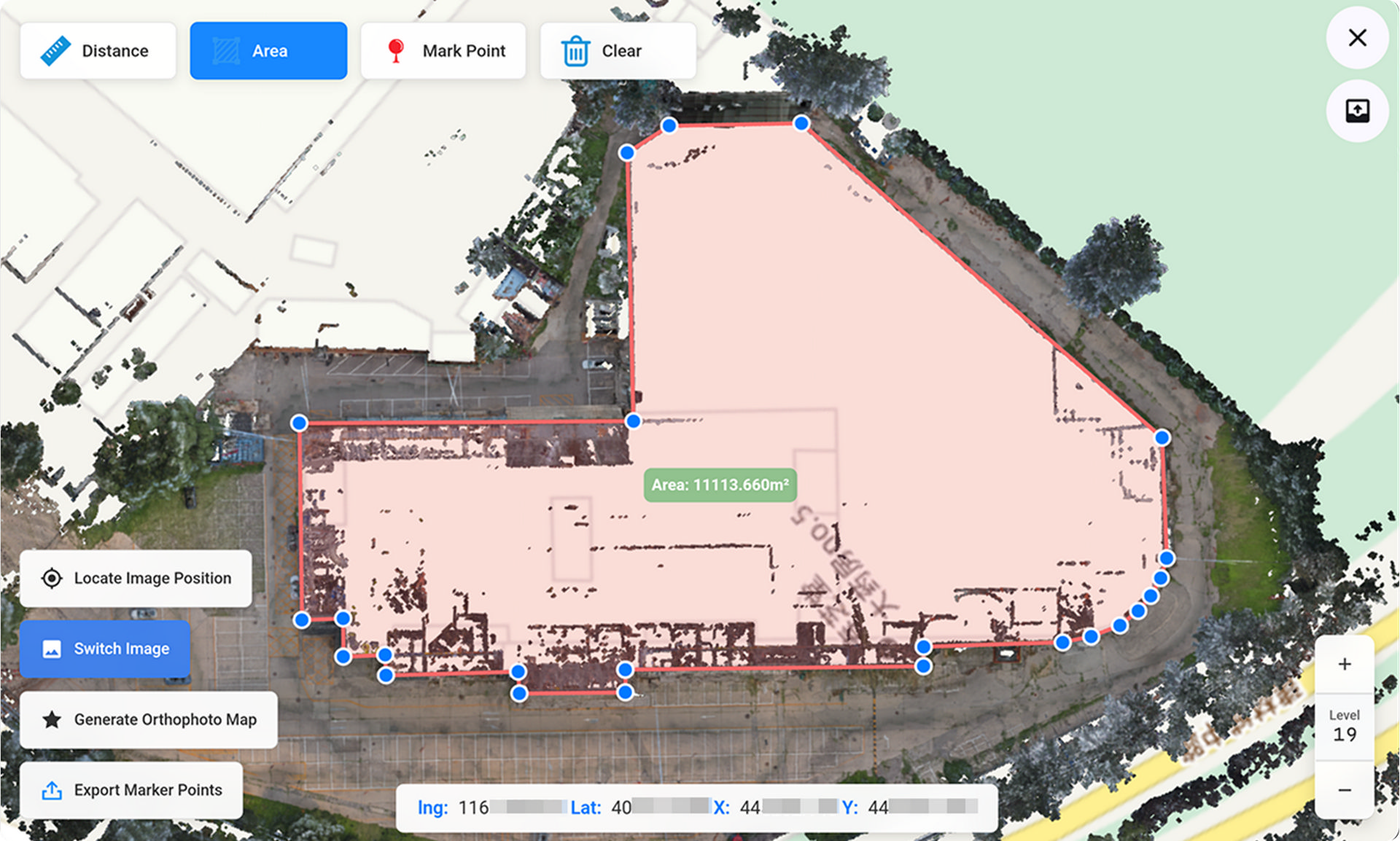
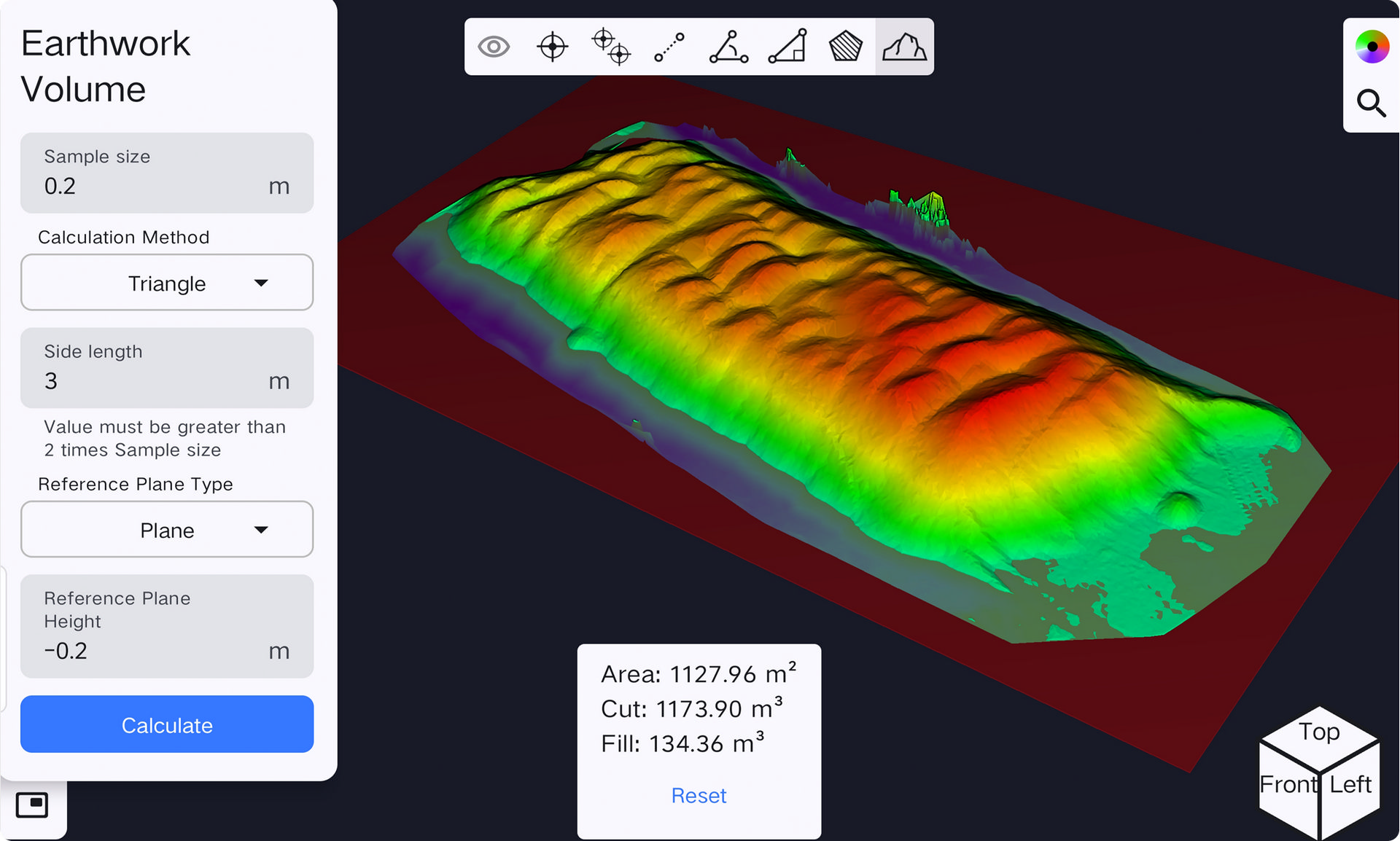
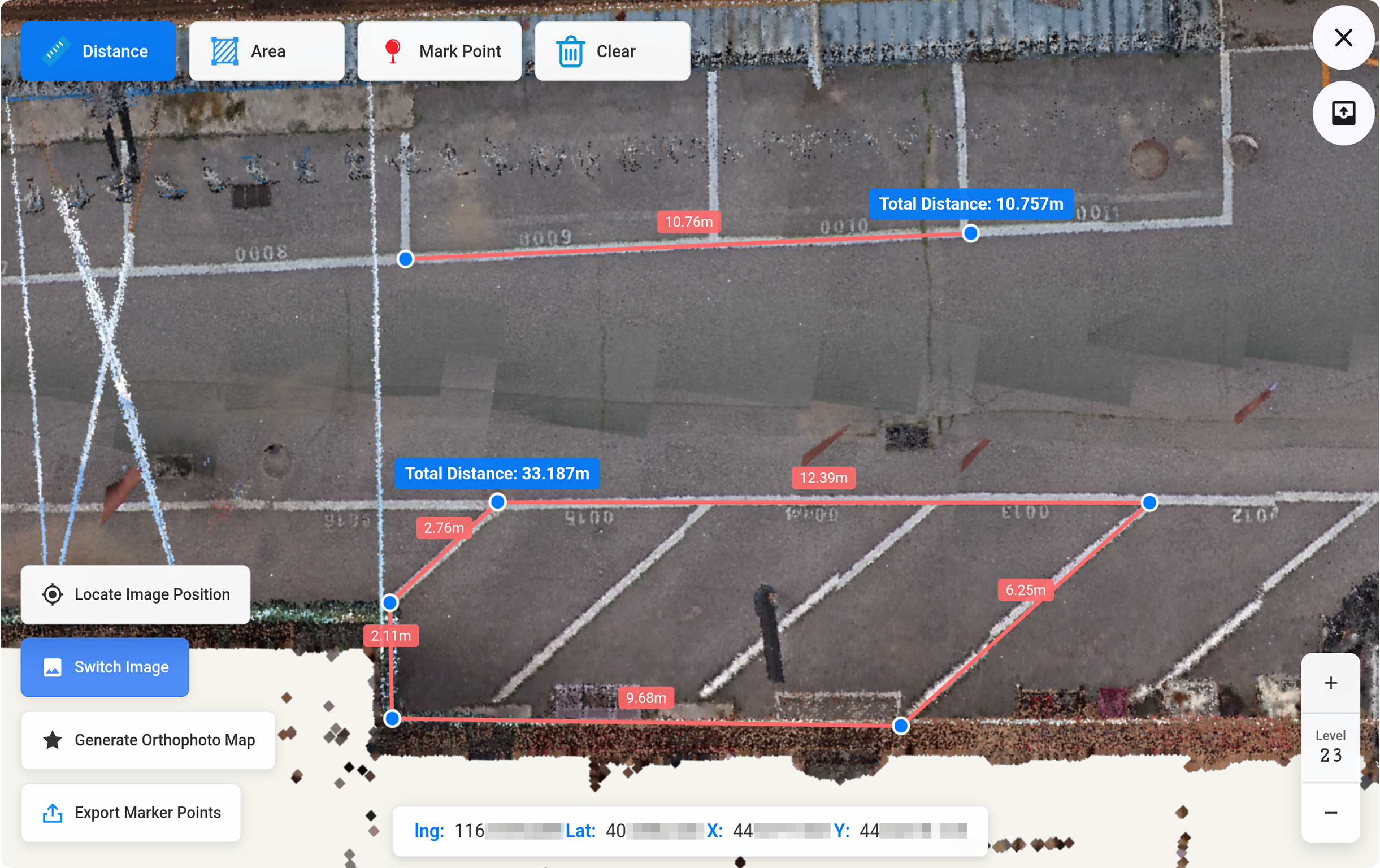
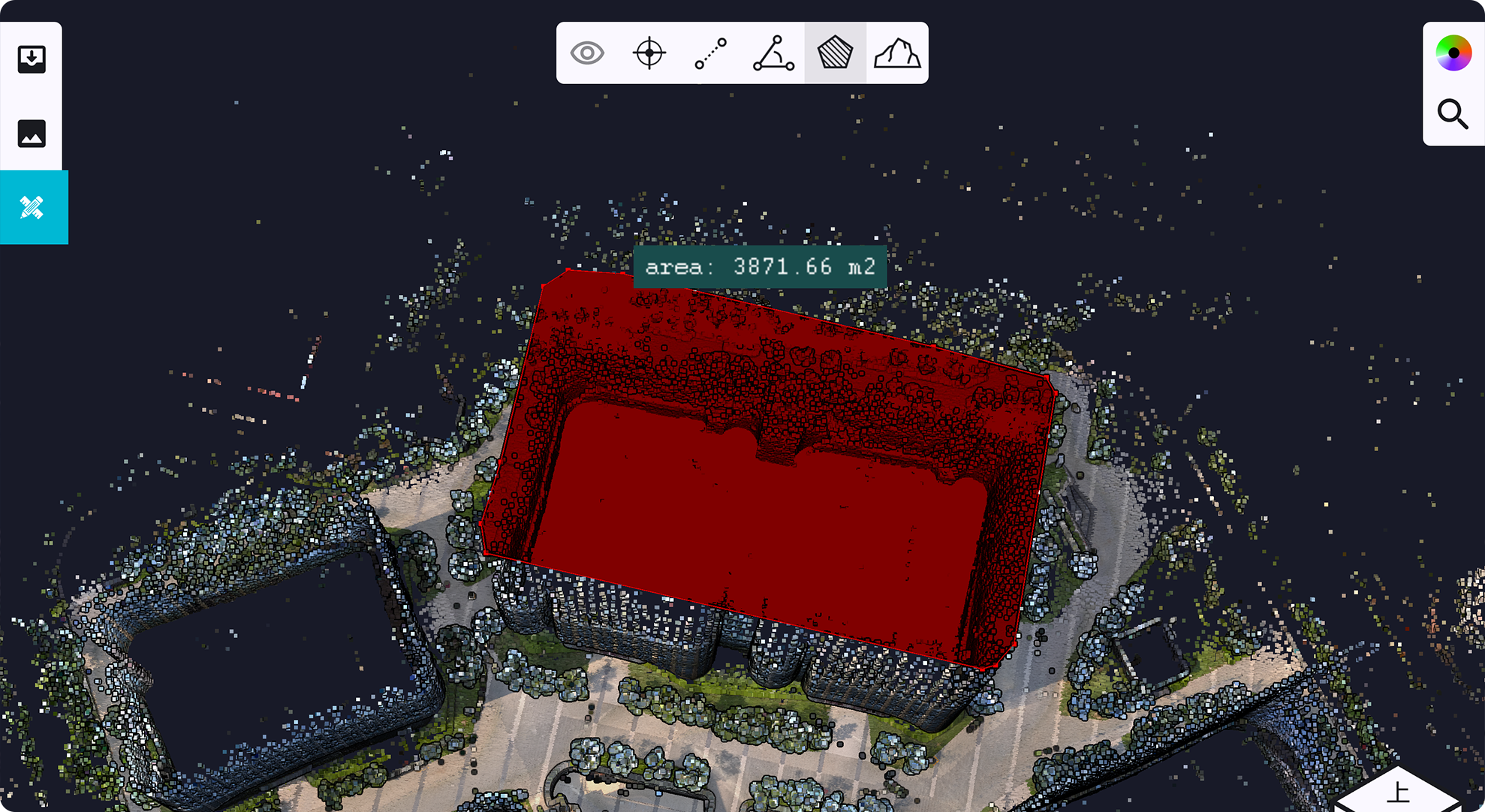
วัดขนาดได้ทันที
โดยทั่วไปแล้ว การแปลงชุดข้อมูลพอยต์คลาวด์ขนาดใหญ่ให้เป็นผลลัพธ์ขั้นสุดท้ายนั้น จำเป็นต้องใช้ซอฟต์แวร์ประมวลผลระดับมืออาชีพ รวมทั้งผู้ใช้งานที่มีทักษะ และเวลาทำงานที่มากเพียงพอ แต่ SLAM Instant APP ซึ่งเปิดตัวมาพร้อมกับ SLAM200E มอบโซลูชันการวัดขนาดแบบทันทีที่ครอบคลุมการทำงานหลายสภาพแวดล้อม เมื่อบันทึกผลลัพธ์พอยต์คลาวด์แบบเรียลไทม์ในภาคสนามแล้ว ก็จะสามารถสร้างรายงานที่พร้อมใช้งานในอุตสาหกรรมได้ภายในไม่กี่นาที
การรวบรวมข้อมูลเชิงพื้นที่แบบบูรณาการทั้งทางอากาศ และภาคพื้นดิน
เครื่องสแกน LiDAR แบบพกพาสามารถเก็บข้อมูล 3 มิติทั้งเหนือพื้นดิน และใต้ดินได้อย่างมีประสิทธิภาพ และบางสถานการณ์ยังคงต้องการข้อมูลพอยต์คลาวด์บนอากาศเพิ่มเติม SLAM200E ได้นำเสนออัลกอริทึมการรวมข้อมูลแบบผสานรวมระหว่างอากาศและพื้นดิน ซึ่งผสานข้อมูลที่รวบรวมได้จากโหมดข้อมูลในอากาศ และโหมดพกพาของเครื่องสแกนเข้าด้วยกัน โดยผสานข้อมูลกลุ่มพอยต์คลาวด์ 3 มิติ ภาพ และข้อมูล 3DGS เข้าด้วยกันอย่างราบรื่น เพื่อมอบโซลูชันแบบรวมศูนย์ของข้อมูลในอากาศ และภาคพื้นดิน

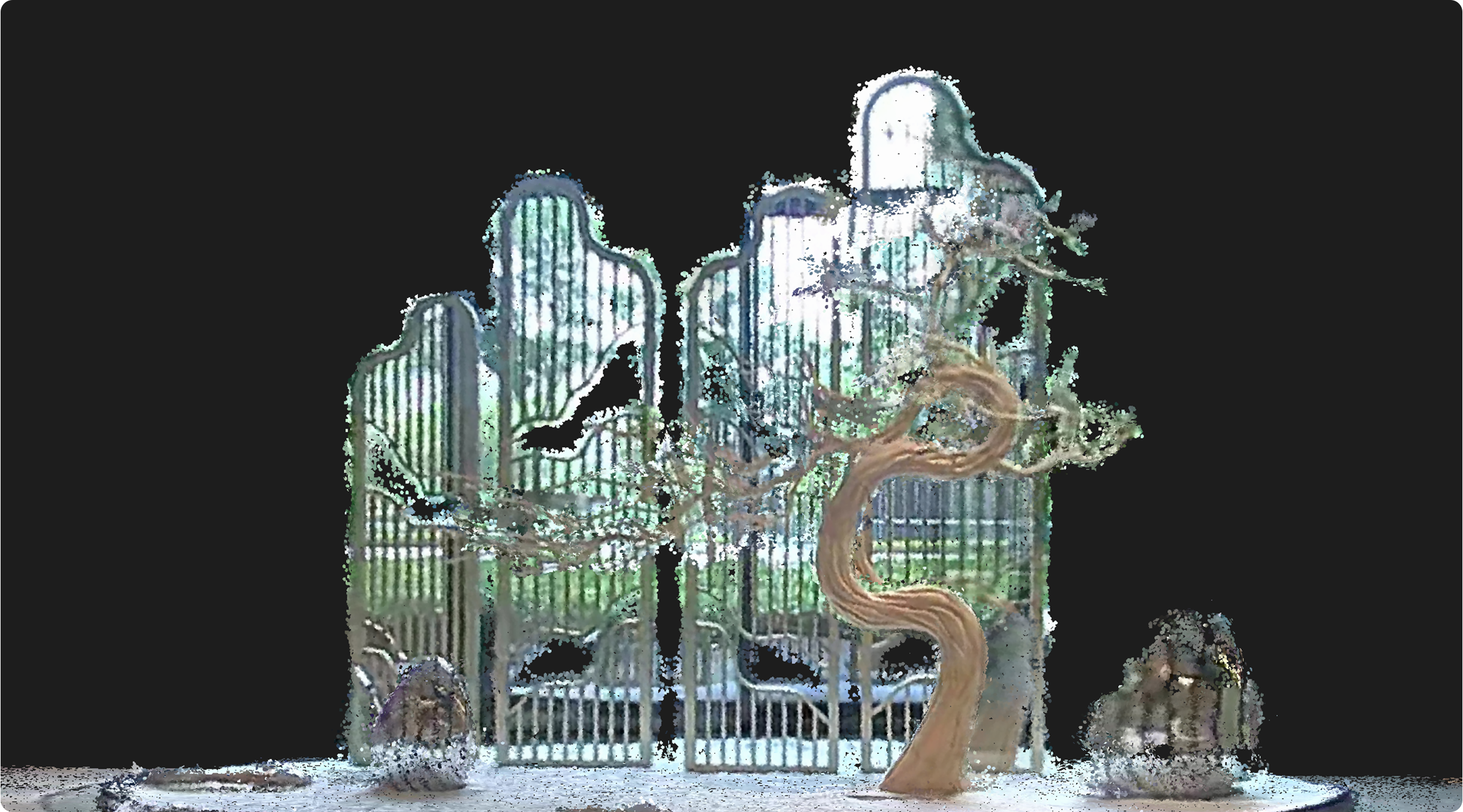
Gaussian Splatting(3DGS)
SLAM200E ช่วยให้สามารถสร้าง ดู และประยุกต์ใช้ข้อมูล Gaussian Splatting ขนาดใหญ่ด้วยภาพพาโนรามา ทั้งผล Gaussian Splatting และข้อมูลระหว่างกลางจะอยู่ในรูปแบบสากล ช่วยให้มั่นใจได้ว่าสามารถทำงานร่วมกับแพลตฟอร์มอื่นๆ ได้อย่างราบรื่น ผู้ใช้เครื่องสแกน LiDAR แบบพกพาสามารถใช้งานฟังก์ชัน Gaussian Splatting ได้ฟรีตลอดชีพ
Static Station Mode
โหมด Static Station ช่วยขจัดข้อผิดพลาดที่เกิดจากการเคลื่อนที่ระหว่างการสแกนแบบพกพาได้อย่างมีประสิทธิภาพ ช่วยให้สามารถเก็บข้อมูลพอยต์คลาวด์ 3 มิติที่มีความแม่นยำสูง ความเที่ยงตรงสูง และมีความหนาแน่นสูงในสถานการณ์ที่มีความยากลำบาก นอกจากนี้ยังรองรับการเก็บข้อมูลในมุมมองเป้าหมายตามที่ผู้ใช้งานกำหนด พร้อมการกำหนดตำแหน่ง และปรับแต่งชุดข้อมูล Static Station ให้เหมาะสมโดยอัตโนมัติ เพื่อเพิ่มคุณภาพข้อมูลและประสิทธิภาพการประมวลผลให้ดียิ่งขึ้น
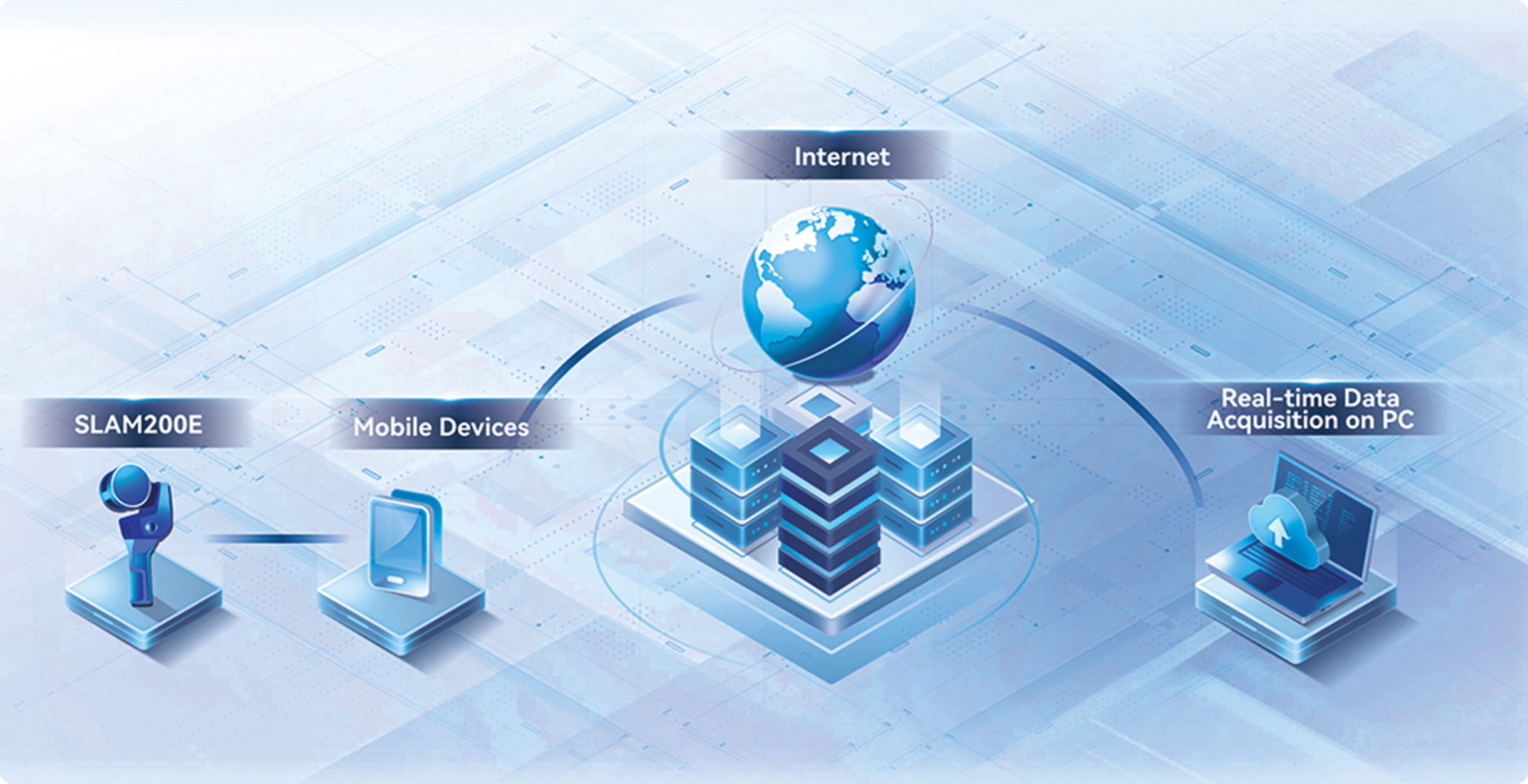
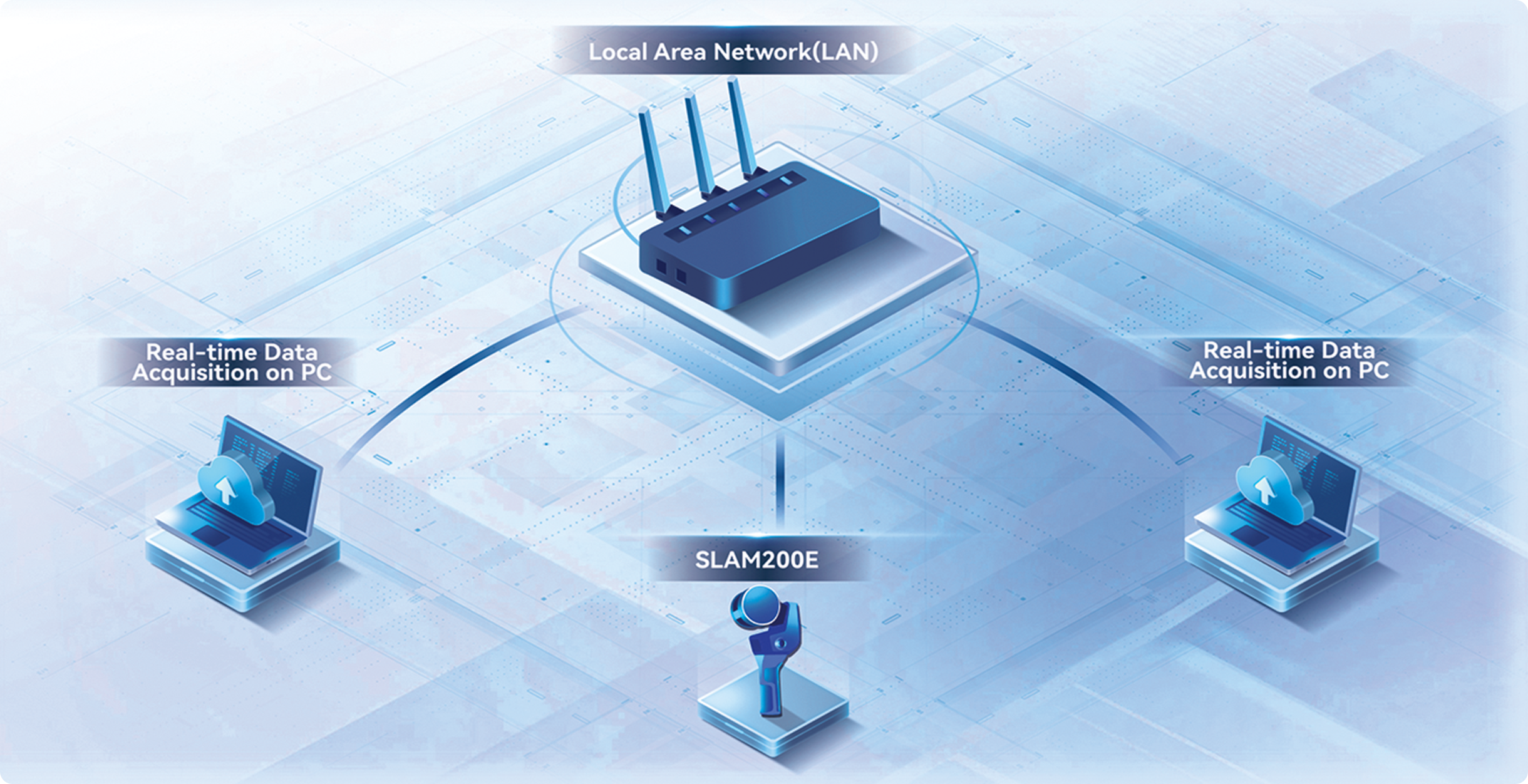
การส่งสัญญาณระยะไกล
ระหว่างการเก็บข้อมูล และการทำแผนที่แบบเรียลไทม์ โดยเฉพาะอย่างยิ่งในงานเหมืองแร่ การรับมือกับเหตุฉุกเฉิน และสถานการณ์ที่คล้ายคลึงกัน เครื่องสแกน LiDAR แบบพกพาสามารถส่งข้อมูลผลการทำแผนที่แบบเรียลไทม์ไปยังศูนย์บัญชาการผ่าน LAN หรืออินเทอร์เน็ต ซึ่งช่วยลดเวลาในการรวบรวมข้อมูลและเร่งกระบวนการตัดสินใจ

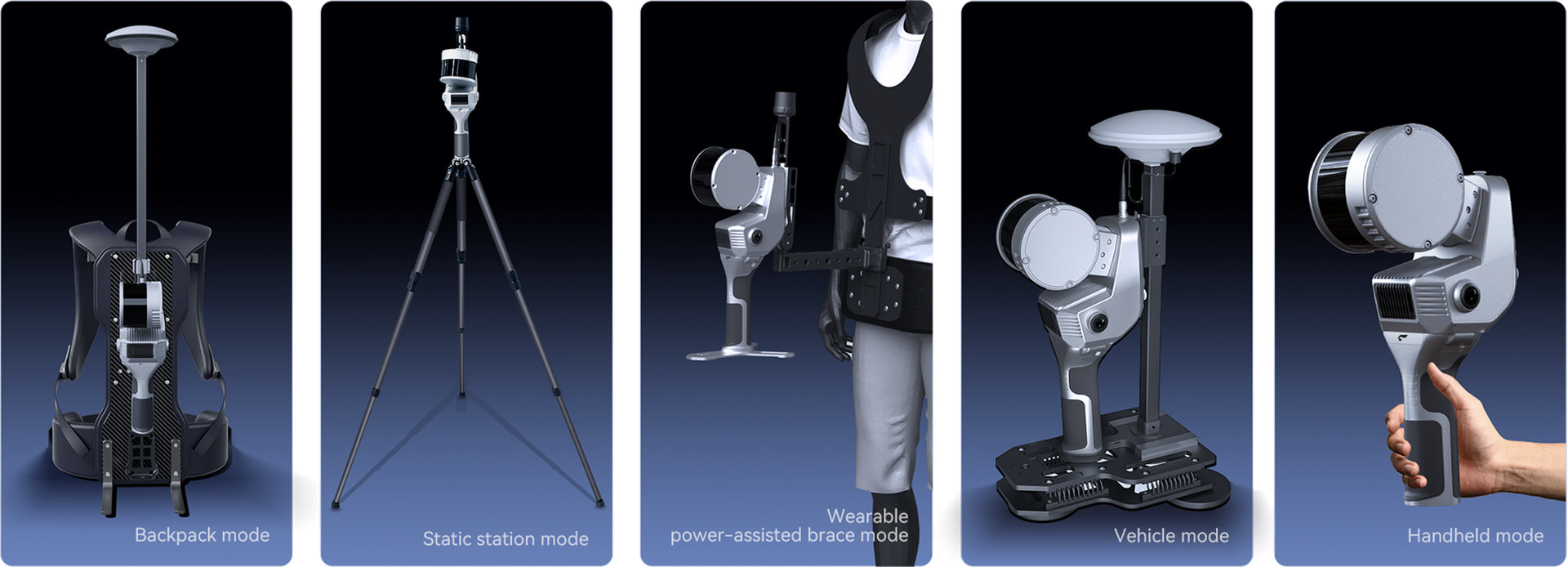
รองรับหลายรูปแบบการทำงาน
SLAM200E มีคุณสมบัติการทำงานแบบโมดูลาร์ที่ใช้งานได้หลากหลายแพลตฟอร์ม ปรับให้เข้ากับการใช้งานภารกิจต่าง ๆ ได้อย่างราบรื่นบนยานพาหนะหลายชนิด รวมถึง UAV ระบบสะพายหลัง อุปกรณ์ยึดยานพาหนะ อุปกรณ์สวมใส่เสริมการเคลื่อนไหวส่วนบุคคล และขาตั้งกล้อง
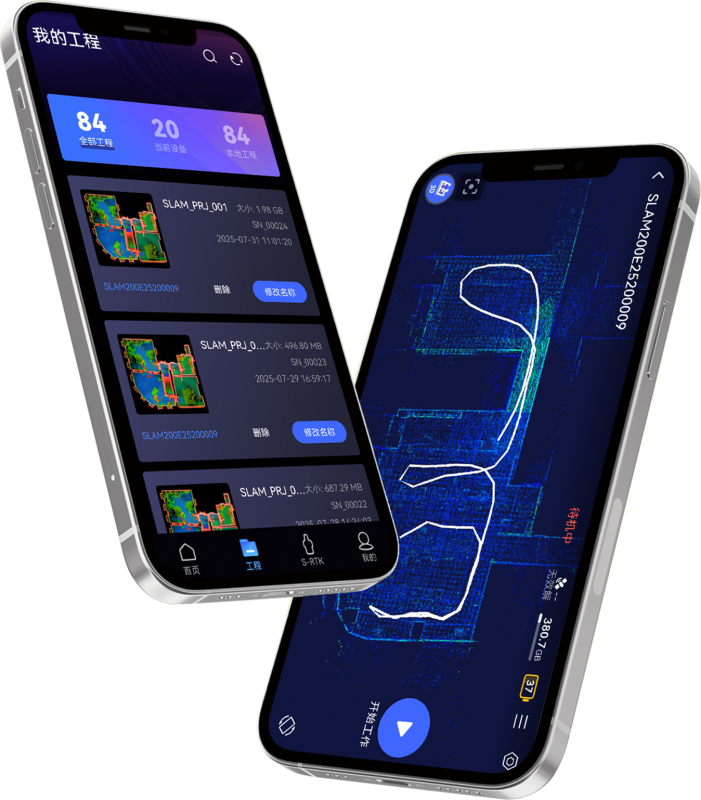
แอป SLAM GO
SLAM GO เป็นแอปพลิเคชันมือถือที่พัฒนาร่วมกับ SLAM โดยแอปสามารถเชื่อมต่อกับ SLAM200E ผ่านโทรศัพท์มือถือ และสามารถจัดการโครงงาน แสดงพอยต์คลาวด์แบบเรียลไทม์ ดูตัวอย่างภาพ อัปเกรดเฟิร์มแวร์ และอื่นๆ แอปนี้ใช้กับระบบปฏิบัติการ Android และ iOS พร้อมกัน
SLAM GO POST Pro
SLAM GO POST ซึ่งฝังอยู่ใน UAV Manager Professional Edition เป็นซอฟต์แวร์พีซีที่ใช้กับ SALM ซอฟต์แวร์นี้สามารถทำการประมวลผลข้อมูลที่รวบรวมมา สร้างพอยต์คลาวด์สีที่มีความแม่นยำ และความคมชัดสูง สร้างภาพพาโนรามาบางส่วน แสดงพอยต์คลาวด์ และประมวลผลอย่างมีประสิทธิภาพ

แอป SLAM Instant
SLAM Instant APP เป็นเครื่องมือเฉพาะทางที่พัฒนาโดย FEIMA Robotics สำหรับการวัดผลภาคสนามแบบเรียลไทม์ ออกแบบมาเพื่อติดตั้งบนแท็บเล็ต Android ช่วยให้สามารถวัดผล ณ สถานที่จริงได้อย่างรวดเร็ว และสร้างรายงานการสำรวจเฉพาะพื้นที่โดยอัตโนมัติได้ทันทีหลังจากการเก็บรวบรวมข้อมูล



ลักษณะการใช้งาน
High-density and High-definition Replication



Real-time Measurement



3DGS




Specifications
| ข้อมูล | รายละเอียด |
| น้ำหนักเครื่อง Weight | 1.6 kg (2.1kg with Battery) |
| ขนาดเครื่อง Dimensions | 404mm x 170mm x 118mm |
| พลังงาน Power Consumption | 26W ใช้แบตเตอรี SP30 ใช้งานต่อเนื่องได้ ~70 นาที |
| แบตเตอรี่ Battery | Lithium Battery SP30 |
| ระยะที่สแกนได้ Range | 0.05–120 m |
| มุมมอง FOV | 360° แนวนอน / 270° แนวดิ่ง |
| กล้องพาราโนมา Resolution | 2 × 12 MP, มุมมอง 210° ต่อกล้อง |
| การเชื่อมต่อ Connection | Wi-Fi, Bluetooth, พอร์ต USB-C, Type-C for external power |
| ความชื้นและอุนหภูมิ Operating temerature | ใช้งาน -20°C ถึง +50°C, ความชื้น < 95% |
SLAM200E เหมาะมากสำหรับงานด้าน
- งานสำรวจ (Surveying) เช่น สำรวจภาคสนาม, โรงงาน, โครงสร้าง
- BIM (Building Information Modeling) ที่ต้องการข้อมูล 3D ที่มี texture และแม่นยำสูง
- งานพิพิธภัณฑ์เสมือน / Cultural heritage ที่ต้องการรายละเอียดสูง
- โครงการดิจิทัล Twin, การตรวจสอบโครงสร้าง, การวางแผนในเมือง ฯลฯ
Gallery
SLAM100 Lidar Sample
SLAM100 Lidar Sample-01
SLAM100 Lidar Sample-02
SLAM100 Lidar Sample-03
SLAM100 Lidar Sample-04

SLAM100 Lidar Sample-05
SLAM100 Lidar Sample-06

SLAM100 Lidar Sample-07

SLAM100 Lidar Sample-08
SLAM100 Lidar Sample-09
อ่านเพิ่มเติม