

{kind=link}
ไม่ว่าจะเป็นงานออกแบบสถาปัตยกรรม รีโนเวทอาคาร สร้างโมเดล 3 มิติ หรือการเก็บข้อมูลเพื่ออนุรักษ์พื้นที่สำคัญ การเก็บข้อมูลพื้นที่ถือเป็นหัวใจสำคัญที่จะทำให้งานดำเนินต่อไปได้ แต่ใช่ว่า
การเก็บข้อมูลพื้นที่นั้นจะทำได้ง่ายเสมอไป หลายคนอาจเคยเจอสถานการณ์ที่ยากลำบาก เช่น ต้องวัดพื้นที่ด้วยมือทีละจุด ใช้เวลานานหลายชั่วโมง พื้นที่จริงมีมุมแคบ ผนังโค้ง หรือเพดานสูง
ทำให้วัดไม่แม่นยำ พอเอาข้อมูลมาสร้างโมเดล 3D กลับมีจุดที่ขาดหายหรือคลาดเคลื่อน ทำให้กระบวนการทำงานสะดุดและต้องย้อนกลับไปแก้ไขหลายรอบ

แต่สิ่งหนึ่งที่จะเข้ามา เปลี่ยนเกมการทำงานแบบเดิมๆ ก็คือ การสแกนพื้นที่ (Space Scanning) หรือการเก็บข้อมูลสภาพแวดล้อมจริงในรูปแบบ 3 มิติดิจิทัลที่ครบถ้วน แม่นยำ และพร้อมใช้งานต่อได้ทันที
ทุกวันนี้เทคโนโลยีนี้กำลังกลายเป็นเครื่องมือที่ขาดไม่ได้สำหรับมืออาชีพในหลากหลายสาขา และอีกหนึ่งเครื่องมือที่น่าสนใจที่เราอยากแนะนำให้คุณได้รู้จัก นั่นก็คือ ” Eagle Max Lidar Scanner “
เครื่องสแกนพื้นที่ระดับมืออาชีพที่ออกแบบมาเพื่อรองรับการทำงานในสถานที่จริงที่ซับซ้อน ด้วยเทคโนโลยี Lidar (Light Detection and Ranging) ที่ใช้เลเซอร์ในการวัดระยะและจับรูปทรง
ของสภาพแวดล้อมได้อย่างละเอียด

- ทำไมต้อง Eagle Max Lidar Scanner
- ข้อมูลเกี่ยวกับพระนอนและความท้าทายในการสแกน
- เตรียมตัวก่อนการสแกน
- ทำการสแกน
- ผลลัพธ์การสแกน
- การสร้างภาพจำลองพื้นที่ 3 มิติ ด้วย Gaussian Splatting
ทำไมต้อง Eagle Max Lidar Scanner
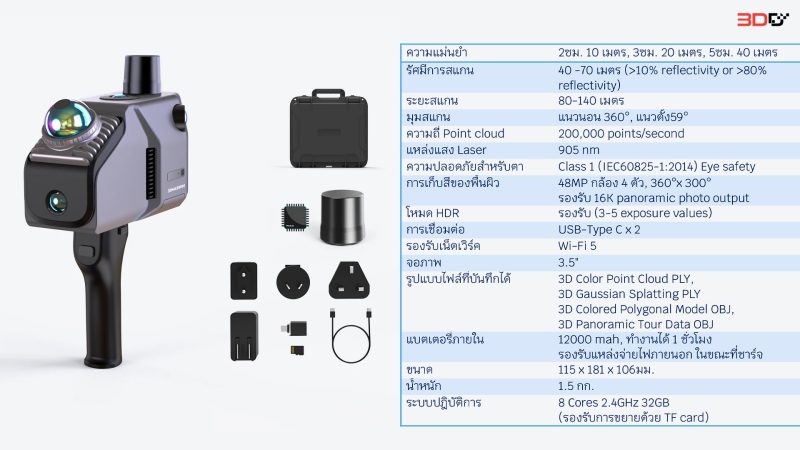
เหตุผลที่เลือกใช้ Eagle Max Lidar Scanner ก็เพราะเครื่องนี้ถูกออกแบบมาสำหรับงานเก็บข้อมูลพื้นที่ขนาดใหญ่ที่ต้องการทั้งความเร็วและความแม่นยำในระดับมืออาชีพ ตัวเครื่องสามารถสแกนได้ไกล
ถึง 140 เมตร ด้วยความแม่นยำสูงสุด 2 เซนติเมตร และเก็บข้อมูลได้สูงสุด 200,000 จุดต่อวินาที พร้อมแสดงผลแบบ Point Cloud real-time บนหน้าจอขนาด 3.5 นิ้ว มุมมองภาพกว้างมาก
ถึง 360 องศาในแนวนอน และ 59 องศาในแนวตั้ง ช่วยให้เก็บข้อมูลได้ครอบคลุมแม้ในพื้นที่ซับซ้อน นอกจากนี้ยังมีกล้องสูงสุด 4 ตัว บันทึกภาพ 8K HDR เพื่อให้ได้สีสันและพื้นผิวที่สมจริง
รองรับการทำงานร่วมกับ RTK Module เพื่อระบุตำแหน่ง GPS ได้อย่างแม่นยำ

สามารถประมวลผลส่งออกไฟล์ได้ในซอฟแวร์ Ray Studio ที่ออกแบบมาให้ใช้งานกับ Eagle โดยเฉพาะ ที่มีฟังก์ชั่นพิเศษในการสร้าง Gaussian Splatting หรือภาพจำลอง 3 มิติที่นำข้อมูล
ไปใช้งานต่อได้ทันที เช่นใน Unreal Engine ตัวเครื่องออกแบบมาให้ใช้งานง่าย พกพาสะดวก สามารถติดตั้งกับขาตั้ง, รถ หรือแม้แต่โดรน ทำให้ตอบโจทย์งานภาคสนามได้หลากหลาย ไม่ว่าจะเป็นงาน
สถาปัตยกรรม, การอนุรักษ์โบราณสถาน, สร้างโมเดล 3D, นิทรรศการเสมือนจริง หรือแม้แต่การถ่ายทำภาพยนตร์ระดับโปรดักชัน
และในบทความนี้เราจะพาทุคนมาดู การสแกนที่อุโบสถวัดเชตุพนวนาราม ซึ่งเป็นวัดเก่าแก่ที่มีพระนอนองค์ใหญ่สวยงามและมีรายละเอียดเยอะ ด้วยเครื่อง Eagle Max Lidar Scanner ที่สแกนได้แม่น
และเก็บข้อมูลได้ครบทุกมุมแม้ในที่แสงน้อยหรือมุมแคบ ใน Showcase นี้ เราจะพาไปดูตั้งแต่ขั้นตอนการสแกนจริงจนถึงการประมวลผลข้อมูล 3 มิติที่ได้ ซึ่งสามารถนำไปใช้ได้หลากหลาย ทั้งการเก็บข้อมูล
อนุรักษ์สถานที่ การออกแบบ หรือแม้แต่ทำโลกเสมือนจริง เป็นตัวอย่างที่ดีว่าการใช้เทคโนโลยีล้ำสมัยช่วยให้การทำงานที่ซับซ้อนเป็นเรื่องง่ายและแม่นยำขึ้นมากจริงๆ

ข้อมูลเกี่ยวกับพระนอนและความท้าทายในการสแกน
พระนอนวัดโพธิ์ หรือ “พระพุทธไสยาสน์” เป็นหนึ่งในพระพุทธรูปที่มีชื่อเสียงและสำคัญที่สุดในประเทศไทย ด้วยขนาดที่ใหญ่ถึง 46 เมตร ประดิษฐานอยู่ภายในอุโบสถที่มีความยาวอาคารประมาณ 50 เมตร
กว้าง 15 เมตร และมีความสูงจากพื้นถึงเพดานประมาณ 20 เมตร ที่ออกแบบมาโดยเฉพาะ มีเสาเรียงรายด้านใน ช่องแสงจากหน้าต่างจำกัด และพื้นที่รอบองค์พระค่อนข้างแคบ ทำให้การเก็บข้อมูล
ด้วยวิธีการวัดทั่วไปทำได้ยากมาก รายละเอียดของพระพักตร์ ลวดลายฝ่าเท้า และสถาปัตยกรรมรอบอุโบสถล้วนเป็นงานศิลป์ชั้นสูงที่สะท้อนความงามของศิลปะไทยอย่างแท้จริง นี่คือเหตุผลว่า
ทำไมสถานที่แห่งนี้ถึงควรค่าแก่การอนุรักษ์ไว้ให้คนรุ่นหลังได้ชื่นชม การสแกนด้วยเทคโนโลยี 3 มิติจึงไม่ใช่แค่การเก็บภาพให้สวยงาม แต่เป็นการบันทึก “มรดกวัฒนธรรม” ในรูปแบบดิจิทัลที่สามารถ
นำไปใช้สร้างโมเดลดิจิทัลเพื่อการศึกษา การฟื้นฟูในอนาคต หรือแม้แต่จัดแสดงในรูปแบบ Virtual Tour ได้ ทำให้แม้แต่คนที่ไม่สามารถเดินทางมาถึงวัดก็ยังสามารถเข้าถึงความงดงามและคุณค่า
ทางวัฒนธรรมของพระนอนได้อย่างใกล้ชิด

เตรียมตัวก่อนการสแกน
ก่อนเริ่มการสแกนพื้นที่ภายในอุโบสถ สิ่งสำคัญที่สุดคือการเตรียมตัวอย่างรอบคอบ โดยเริ่มจากการศึกษาข้อมูลเบื้องต้นของสถานที่ เช่น ขนาดของอาคาร ความสูงของเพดาน พื้นที่ที่สามารถ
เดินเข้าถึงได้จริง รวมถึงจุดที่อาจเป็นอุปสรรคต่อการเก็บข้อมูล เช่น มุมอับ ผนังโค้ง ช่องว่างระหว่างเสา หรือบริเวณที่แสงสว่างเข้าไม่ถึง ข้อมูลเหล่านี้จะช่วยให้เรารู้ว่าจุดไหนควรระวัง และจุดไหนต้องใช้
เทคนิคพิเศษในการสแกน จากนั้นจึงนำข้อมูลที่ได้มาวางแผนเส้นทางการเดินสแกนให้มีประสิทธิภาพที่สุด โดยคำนึงถึงการเดินให้ครอบคลุมพื้นที่ทั้งหมดแบบต่อเนื่อง ลดจุดทับซ้อน และหลีกเลี่ยง
การพลาดจุดสำคัญที่อาจแก้ไขได้ยากในภายหลัง ซึ่งการเตรียมตัวในขั้นตอนนี้ไม่เพียงช่วยให้การทำงานราบรื่นขึ้นเท่านั้น แต่ยังส่งผลโดยตรงต่อคุณภาพของข้อมูล 3 มิติที่ได้อีกด้วย
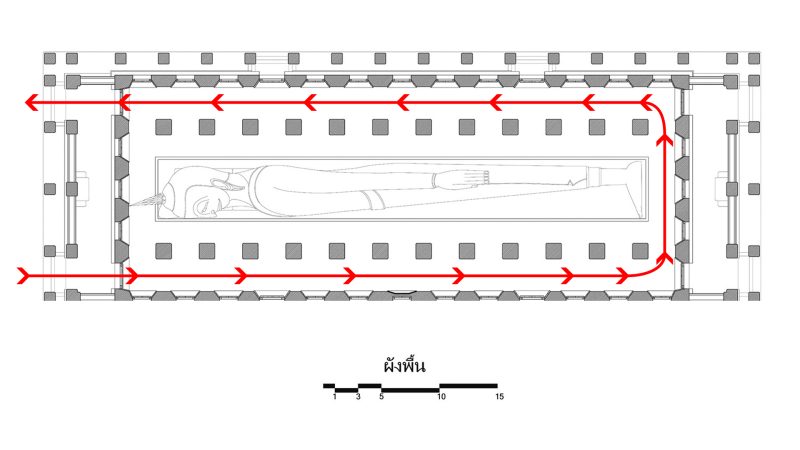
โดยเส้นทางการเดินที่เราวางไว้คือเราจะเดินเข้าทางด้านหน้าอุโบสถเดินไปและกลับมาด้านหน้าอุโบสถประตูอีกฝั่งเป็นรูปตัว U เนื่องจากมีพื้นที่ปิดเป็นตัวกั้นไม่ให้เดินได้โดยรอบ อุปสรรคในการสแกน
ครั้งนี้คือ ความแคบของพื้นที่ ที่เป็นห้องโถงที่สูงถึง 20 เมตร แต่กว้างเพียง 15 เมตร ถึงแม้ Eagle จะมีรัศมีการสแกนในแนวระนาบถึง 140 เมตร และในแนวดึ่งถึง 59° แต่ด้วยความแคบนั้น
อาจทำให้การสแกนอย่างครอบคลุมทำได้ยากขึ้น เพราะเมื่อวัตถุอยู่ไกล้เครื่องสแกน อาจทำให้การสแกนในแนวดิ่งทำได้น้อยลง ฉะนั้นสิ่งที่เราจำเป็นต้องทำคือการแหงนเครื่องขึ้นเป็นระยะๆ
เพื่อเก็บข้อมูลให้ถึงด้านบน แต่ต้องบอกไว้ก่อนว่าสิ่งที่ควรทำในการใช้เครื่องแบบเดินสแกนนั้น คือควรถือเครื่องนิ่งๆในระดับเดียวกันเสมอเพราะบางครั้งการสแกนอาจเกิด
“การหลุดตำแหน่ง”( Tracking Loss ) เนื่องจากมีจุดอ้างอิงไม่พอ แต่ในเคสนี้้มีพระนอนตรงกลาง คิดว่าเป็นจุดอ้างอิงที่ดีพอในการแหงนเครื่องขึ้น แต่ก็ควรทำอย่างระมัดระวัง
ทำการสแกน
การสแกนภายใน
เรามาถึงยังสถานที่สแกนเวลาประมาณ 10 โมงและได้พบกับอุปสรรคอีกอย่างที่สถานที่ท่องเที่ยวนั้นต้องมี นั่นก็คือนักท่องเที่ยว ซึ่งแน่นนอนว่าวัดโพธิ์เป็นวัดดังย่อมมีนักท่องเที่ยวมาเยือน
ไม่ขาดสายแน่นนอน แต่เป็นสิ่งที่เราเลี่ยงไม่ได้ แต่หากคุณต้องสแกนพื้นที่ แนะนำว่าสแกนพื้นที่ตอนไม่มีคนจะได้ประสิทธิภาพดีที่สุด

เมื่อถึงวัดแล้วก็ประกอบตัวเครื่องกับด้ามจับและ RTK Module เพื่อระบุพิกัดตำแหน่งที่แม่นยำมากยิ่งขึ้น ผมพกเพียงตัวเครื่องติดตัวมาเท่านั้นเพราะ Eagle มีจอขนาด 3.5″ และระบบประมวลผลในตัว
จึงไม่ต้องพึ่งอุปกรณ์ต่อพ่วงอื่นๆ ทำให้มีความคล่องตัวสูง เพียงเท่านี้ก็พร้อมสแกนแล้ว

ก่อนอื่นก็ต้องตั้งค่าก่อนการสแกน ซึ่ง Eagle มีการสแกนให้เลือก 2 Mode คือ Indoor กับ Outdoor ควรเลือก Mode ให้เหมาะสมกับการสแกน ซึ่งเรากำลังจะสแกนภายในอุโบสถจึงเลือกเป็น Indoor
เพื่อโฟกัสไปที่การเก็บรายละเอียดในพื้นที่แคบ

เมื่อพร้อมแล้วก็เริ่มทำการสแกนได้เลย เมื่อกดเริ่มสแกนควรอยู่กับทีก่อนซัก 3 วินาทีเพื่อเก็บข้อมูลอ้างอิง แล้วจึงเริ่มเดิน ผมหาช่วงจังหวะที่คนเริ่มน้อยแล้วจึงเริ่มสแกน ในการสแกนครั้งนี้นอกจากพื้นที่
ที่แคบแล้ว ยังมีอีกหนึ่งอุปสรรค นั่นคือโครงสร้างเสาภายในอุโบสถที่มีเสาโดยรอบทุกๆประมาณ 2-3 เมตรตามทางที่เราเดิน และพื้นที่รอบองค์พระนอนที่ไม่สามารถเดินเข้าไปได้ เพราะฉะนั้น
ผมจะเดินตามทางที่เราวางไว้เป็นรูปตัว U และจะแวะตามช่องเสาที่เดินเข้าไปได้ เพื่อเก็บข้อมูลองค์พระให้มากที่สุด เมื่อเข้าไปตามช่องเสาผมจะหยุดเพื่อเก็บด้านหน้า ด้านซ้าย ด้านขวา แล้วจึงค่อยๆ
แหงนเครื่องขึ้นเพื่อเก็บข้อมูลด้านบน แล้วจึงค่อยๆถอยมาสแกนตามเส้นทางหลัก โดยคอยดูให้ Point cloud ที่สแกนได้มีความต่อเนื่องกัน ทำอย่างนี้เป็นระยะๆ คือเดินตามทางหลัก และแวะเข้า
ตามช่องเสา ไปจนสุดเส้นทางที่วางไว้ การสแกนนี้ใช้เวลาประมาณ 10 นาทีก็เสร็จแล้ว

การสแกนภายนอก
Eagle เป็นเครื่องสแกนที่มีระยะสแกนที่ไม่ได้ถูกออกแบบมาเพื่อสแกนพื้นที่หรือสิ่งก่อสร้างขนาดใหญ่ เช่น ตึกสูง หรือสนามกีฬาขนาดใหญ่ ระยะสแกนของเครื่องจะเหมาะกว่า กับงานสแกนงาน
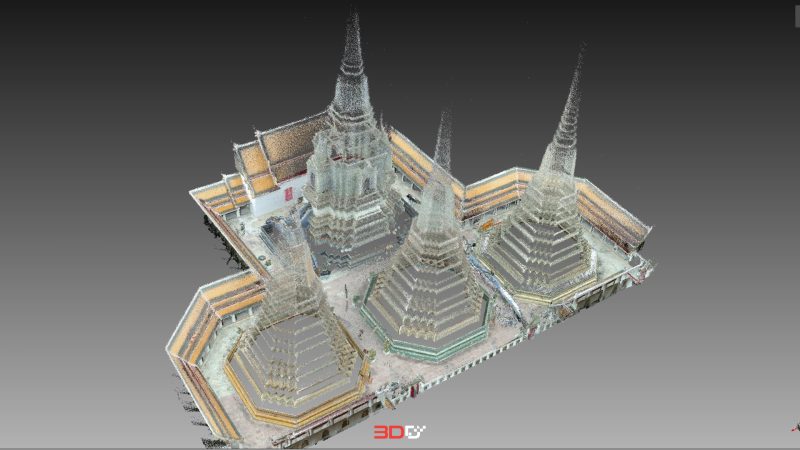
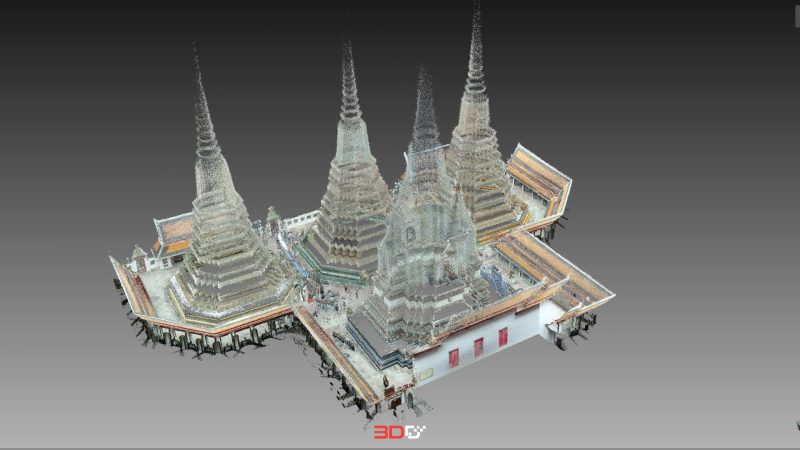
ภายในอาคาร หรืออาคารสิ่งก่อสร้างที่ไม่สูงมากนักอาคาร ( 3-4ชั้น ) เรามาดูกันว่างานสแกนภายนอกกับการสแกนบริเวณ พระมหาเจดีย์ 4 รัชกาล ให้ดูกันว่าจะได้ผลลัพธ์ยังไงบ้าง

กระบวนการสแกนก็เหมือนกับด้านใน คือวางแผนเส้นทางการเดินโดยเส้นทางการเดินควรให้ได้สแกนครบทุกด้าน แต่ก็มีอุปสรรคในเรื่องของพื้นที่แคบเหมือนเดิม ผมจะทำเหมือนเดิมโดยการเอียงเครื่องขึ้น
ตามจุดที่เป็นด้านทั้ง 4 ของแต่ละเจดีย์ สแกนแบบนี้จนครบทุกองค์ โดยไม่ลืมที่จะเก็บพื้นที่ด้านล่างให้ครบด้วย การสแกนเจดีย์นี้ใช้เวลาประมาณ 8 นาที
ผลลัพธ์การสแกน
หลังการสแกนสามารถถ่ายข้อมูลจากเครื่อง Eagle ไปยังคอมพิวเตอร์เพื่อประมวลผลและส่งออก Point Cloud ได้โดยผ่าน Wifi หรือการเสียบ Flash Drive ไปยังตัวเครื่องเพื่อดึงข้อมูล และนำไป
ประมวลผลในโปรแกรม Ray Studio โปรแกรมที่สามารถ Dowload จากเว็บไซต์ผู้ผลิตมาใช้งานได้เลยโดยไม่ต้องซื้อเพิ่ม!! สามารถ Generate และ Export ไฟล์ Point Clound ได้ ( .ply, .las, .pcd, .e57 )
ก็จะได้ผลลัพธ์ประมาณนี้
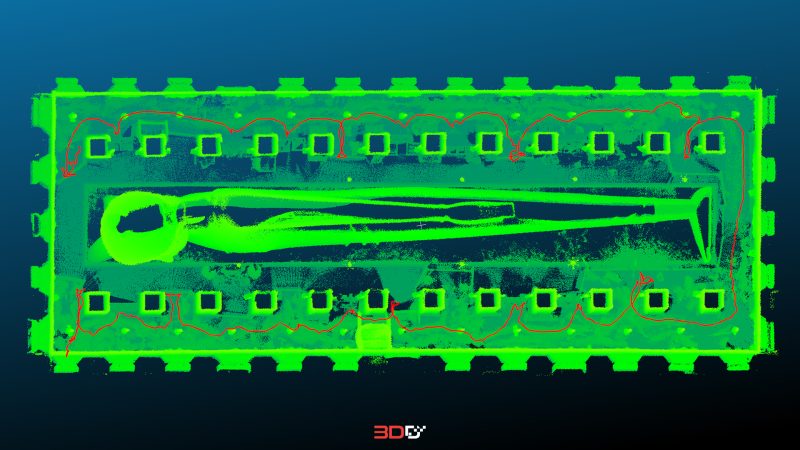
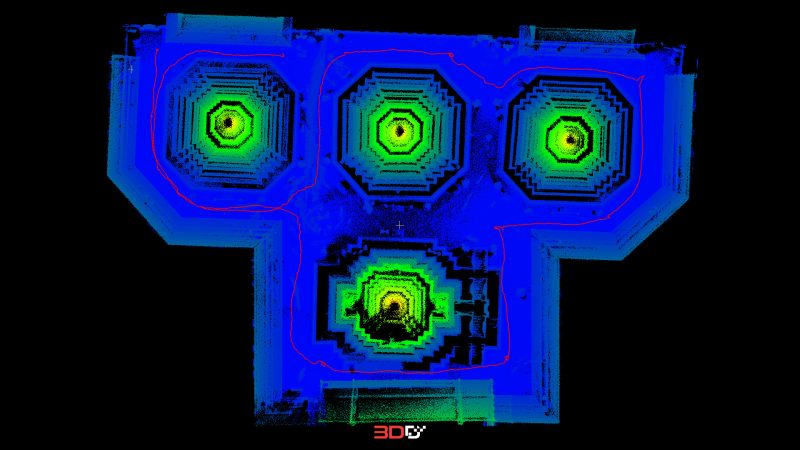
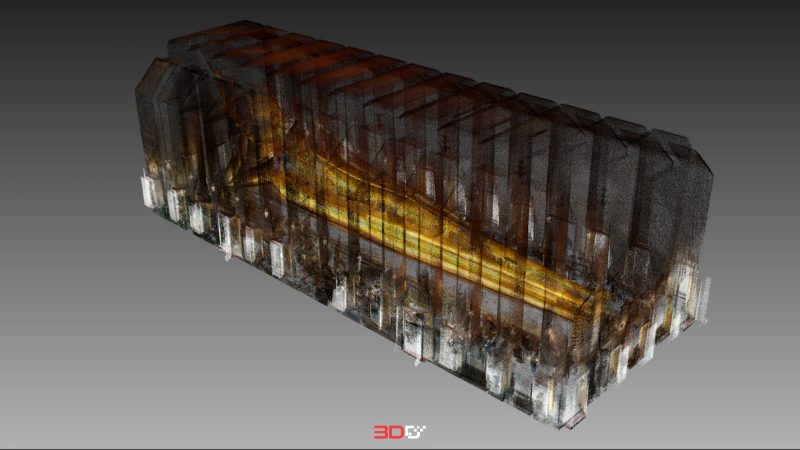
ภายใน ( Indoor Scan )
จะเห็นว่า ถึงแม้จะมีพื้นที่แคบและมุมอับค่อนข้างมาก Eagle ก็ยังสามารถเก็บรายละเอียดโครงสร้างอาคารออกมาได้ค่อนข้างครบ แต่จะมีบางจุดที่ไม่สามารถเดินเข้าไปได้ ( มีที่กั้นหรือมีนักท่องเที่ยวอยู่ )
และส่วนด้านบนเศียรพระนอนที่ไม่สามารถเก็บข้อมูลได้ถึง(ทำได้หากติดตั้งกับโดรน) ทำให้ข้อมูลบางส่วนขาดหายไปบ้างแต่โดยรวมทั้งหมดก็เก็บข้อมูลได้เพียงพอต่อการนำไปใช้งานต่อแล้ว
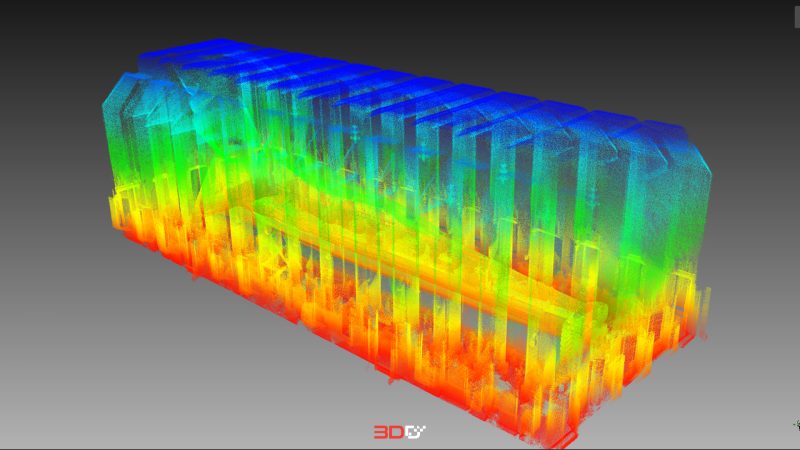

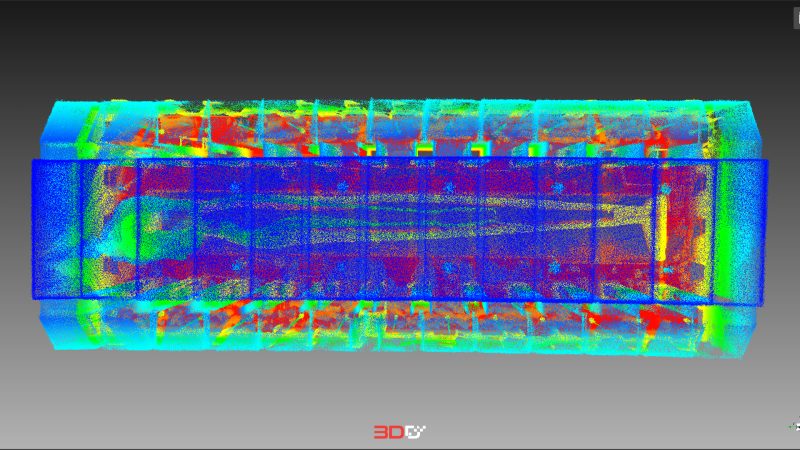
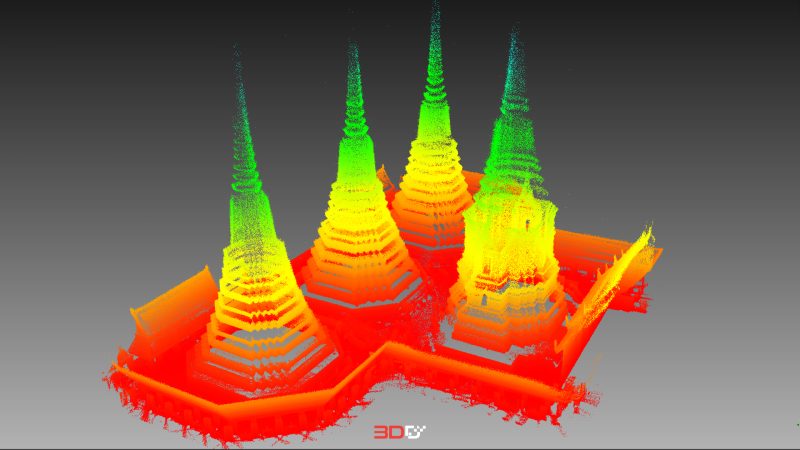
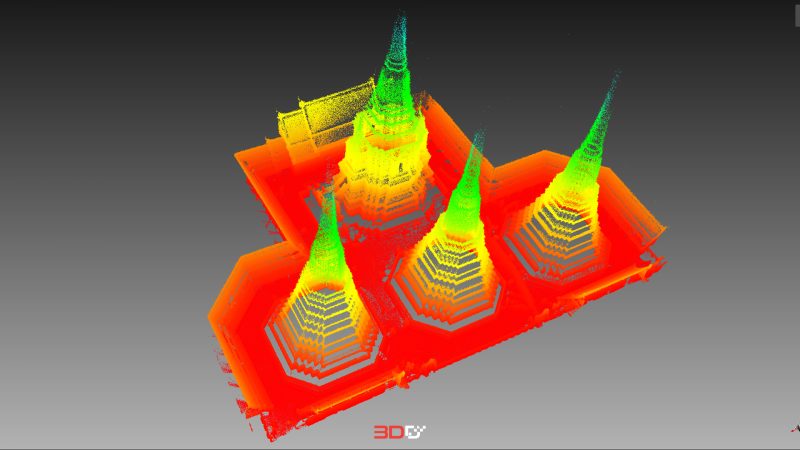
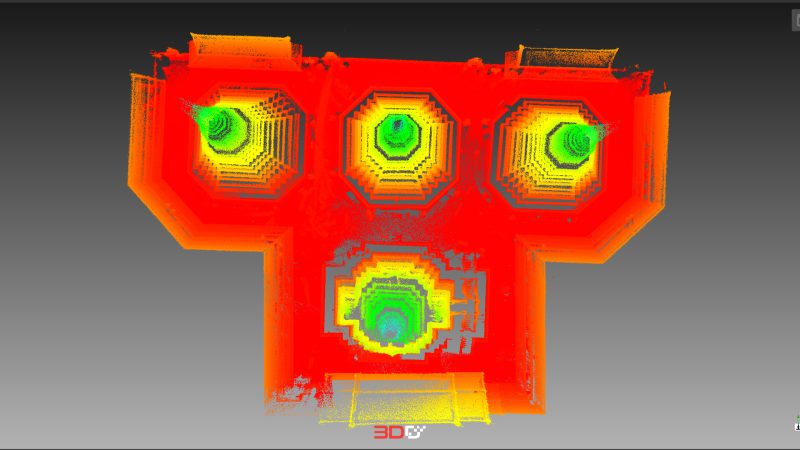
ภายนอก ( Outdoor Scan )
การสแกนภายนอกในเวลาประมาณ 11 โมงกับเจดีย์ที่มีความสูงเกือบ 45 เมตร ก็ถือว่าเก็บข้อมูลมาได้เกือบสมบูณณ์เพราะพื้นที่รอบมีความแคบจึงใช้วิธีการแหงนเครื่องขึ้น แต่หากพื้นที่กว้างกว่านี้
อาจเก็บข้อมูลในจุดที่อยู่สูงทำได้ดีขึ้น

การสร้างภาพจำลองพื้นที่ 3 มิติ ด้วย Gaussian Splatting
อีกหนึ่งฟังก์ชันที่มีมาในโปรปแกรม Ray Studio ซึ่ง Gaussian Splatting คือวิธีแสดงผลภาพ 3 มิติแบบใหม่แทนการสร้างโมเดลซับซ้อน เหมาะสำหรับแปลงภาพถ่ายหรือข้อมูลจากเครื่องสแกน 3D
ให้กลายเป็นฉากเสมือนจริงได้อย่างรวดเร็ว ภาพที่ได้จะดูสมจริงและลื่นไหล เหมาะกับงานอย่าง VR, AR, การอนุรักษ์สถานที่ หรือโชว์ผลงานแบบ 3D แบบไม่ต้องทำโมเดลเอง ลองมาดูผลลัพธ์การสร้าง
Gaussian Splatting ของงานสแกนของเรากันครับ

-
 LaserSpace Capture
LaserSpace CaptureSLAM100 Handheld Lidar Scanner | Space Capture แบบมือถือระดับโปรเครื่องแรกที่ต่ำกว่าล้าน
779,000.00 ฿ Add to cart -

Matterport Axis Gimbal + Tripod สำหรับถ่ายภาพ 360
4,490.00 ฿ Add to cart -
 Space Capture
Space CaptureGALOIS M2 (Realsee) | กล้องเก็บภาพ 3มิติระดับสูง 3D Professional LiDAR Camera
Original price was: 299,000.00 ฿.249,000.00 ฿Current price is: 249,000.00 ฿. Add to cart -
 Space Capture
Space CaptureEagle LiDAR Scanner with RTK Module | เครื่องสแกนพื้นที่ สำรวจพื้นที่ Space Capture
169,900.00 ฿ Add to cart -

Agisoft Metashape Professional
เริ่มต้น 8990บ. Standard / Professional โปรดสอบถาม Add to cart