


ในบทความนี้ เราจะกล่าวถึงข้อผิดพลาดในการใช้งาน 3D Scanner กับการสแกน 3 มิติที่พบบ่อยที่สุด 10 อันดับแรก ได้รวบรวมปัญหาหลักๆมาให้ผู้ใช้งานแล้วจะได้หลีกเลี่ยงปัญหาต่างๆเหล่านี้ เพื่อที่จะได้ทำให้งานออกมาได้อย่างมีคุณภาพที่สุด มาเริ่มกันเลยครับ
1. Not Adjusting the Exposure (ไม่ปรับแสงของเครื่องให้สอดคล้องกับสถาวะแสงของวัตถุ)
ควรตั้งค่าการรับแสงของตัวเครื่อง 3D Scanner ของผู้ใช้ให้เหมาะสมกับสภาวะพื้นที่ ที่กำลังจะทำการสแกนให้ดีผู้ใช้บางคนคิดว่าการตั้งค่าแบบอัตโนมัติเป็นสิ่งที่ดี ถามว่าดีไหมก็ใช้งานได้ครับแต่ยังไม่ดีมาก อาจจะทำให้การสแกนเกิดการสะดุดในบางช่วงได้ เพราะฉะนั้นเราควรที่จะปรับแสงให้เหมาะสมกับสภาวะ ณ ตอนนั้นก่อนโดนการปรับจะพิจรณาจากภาพในโปรแกรม และผิวงานที่สแกนติดได้ เราจะเน้นให้ติดได้มากที่สุดเป็นอันว่าดี
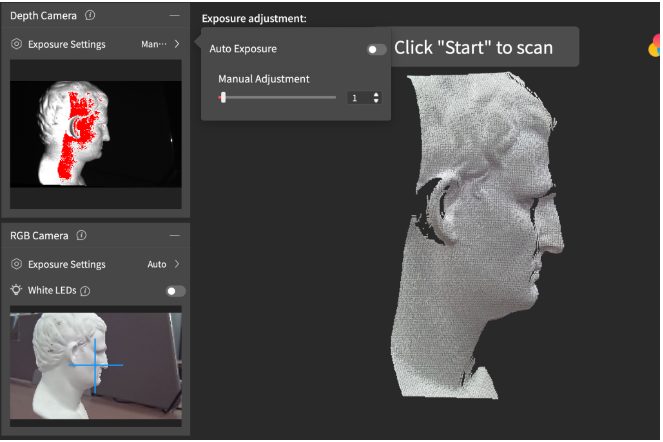 เป็นวิธีแก้ไขที่ค่อนข้างง่าย โดยปรับระดับแสงของกล้องความลึกจนกว่าจะมีจุดสีแดงหรือสีน้ำเงินจางๆ เน้นแค่จางๆ พอนะครับบนวัตถุในหน้าต่างแสดงตัวอย่างของโปรแกรม Revo Scan น้อยที่สุดเท่าที่จะทำได้ และอย่าลืมตั้งค่าแสงของกล้อง RGB ด้วยหากทำการสแกนสีของชิ้นงานนั้น
เป็นวิธีแก้ไขที่ค่อนข้างง่าย โดยปรับระดับแสงของกล้องความลึกจนกว่าจะมีจุดสีแดงหรือสีน้ำเงินจางๆ เน้นแค่จางๆ พอนะครับบนวัตถุในหน้าต่างแสดงตัวอย่างของโปรแกรม Revo Scan น้อยที่สุดเท่าที่จะทำได้ และอย่าลืมตั้งค่าแสงของกล้อง RGB ด้วยหากทำการสแกนสีของชิ้นงานนั้น
2. Not Treating Surfaces (พิจรณาผิวงานก่อนว่าผิวงานมีความ มัน,เงา,สะท้อนแสง และ สีดำ)
พิจรณาชิ้นงานดังกล่าวนี้คือการดูว่าชิ้นงานที่จะทำการสแกนนั้นมีความเป็นสีดังกล่าวหรือเปล่าคือ มัน เงา สะท้อนแสง และดำ เนื่องจากหลักการของ 3D Scanner คือการยิงแสงไปที่วัตถุและนำแสงที่สะท้อนกลับมาแปลงเป็นข้อมูลทางดิจิตอลในกระบวนการคอมพิวเตอร์ หากเกิดว่ากรณีชิ้นงานดังกล่าวเข้าเงื่อนไขที่ระบุเอาไว้ ก็ควรที่จะใช้ตัวช่วยก่อนที่จะสแกนชิ้นงานก็คือ พ่นสเปรย์ผงแป้งลงไปบนวัตถุ เพื่อกลบผิวชิ้นงานนั้นให้ไม่เกิดผิวงานดังข้างต้น
และข้อผิดพลาดในการสแกนอีก 1 อย่างก็คือ ชิ้นงานที่มีความ สมมาตร (Symmetry) หรือผิวงานเรียบไม่มีลวดลายนั้นควรที่จะต้องใช้ตัวช่วย ก็คือแผ่น Markers แปะไปที่ผิวงานก่อนที่จะทำการสแกนเพื่อให้คุณภาพการสแกนได้ดี ไม่หลุดบ่อยๆ
3. Picking the Wrong Settings (เลือกการตั้งค่าก่อนการสแกนชิ้นงานให้เหมาะสมกับชิ้นงาน)
การตั้งค่าก่อนสแกนค่อนข้างสำคัญพอสมควร พิจรณาจากชิ้นงานและดูว่าชิ้นงานที่เราจะทำการสแกนต้องติด Markers หรือป่าวหากว่าติด Markers แล้วเราไม่เลือกสแกนเก็บ Markers นั้นก็จะไม่สามารถสแกนชิ้นงานได้เลยควรตั้งค่าให้ถูกต้องการที่จะเลือกการสแกนชิ้นงาน
4. Movement (การเคลื่อนที่สแกนชิ้นงานแบบถูกต้องโดยใช้ความเร็วที่เหมาะสม)
ความเหมาะสมในการสแกนชิ้นงาน เร็วเกินไปหรือช้าเกินไป ไม่เหมาะสำหรับการสแกน 3D ที่ดี ความเร็วเกินไปมักส่งผลให้สูญเสียการติดตามหรือหลุดกรอบการสแกน และการช้าเกินไปจะทำให้มีการสแกนพื้นที่เดียวกันมากเกินไป ซึ่งส่งผลต่อคุณภาพของโมเดลขั้นสุดท้ายของคุณมีขนาดไฟล์งานที่ใหญ่ สิ่งนี้ใช้ได้กับทั้งการสแกนแบบใช้มือถือหรือแบบหมุน ดังนั้นวิธีที่ดีที่สุดสำหรับการสแกนแบบมือถือก็เหมือนกับเต่าและกระต่าย กล่าวอีกนัยหนึ่ง ช้าและมั่นคงจะทำให้คุณได้รับการสแกน 3D ที่ดีที่สุด
สำหรับการโดยใช้ถาดหมุนชิ้นงานอัตโนมัติ อย่าตั้งค่าความเร็วของแผ่นหมุนต่ำเกินไป การหมุนแต่ละครั้งไม่เกิน 40 วินาทีก็ถือว่าใช้ได้
5. Environment (ตรวจสอบสภาวะแวดล้อมสำหรับชิ้นงานที่จะสแกน 3 มิติ)
3D Revopoint ส่วนใหญ่ใช้แสงอินฟราเรด ดังนั้นแหล่งกำเนิดแสงใดๆ ที่ปล่อยแสงอินฟราเรดจะรบกวนการสแกน 3 มิติ ตัวอย่างเช่น แสงแดดโดยตรง ไม่ว่าจะเป็นกลางแจ้งหรือที่ส่องผ่านหน้าต่าง จะส่งผลต่อคุณภาพของการสแกน หมายความว่าการควบคุมแสงเป็นสิ่งสำคัญในทุกครั้งที่คุณสแกนหากคุณต้องการสแกนภายนอก วิธีที่ดีที่สุดคือสแกนในเวลาตอนเย็น หรือ ค่ำๆ หรือในวันที่มืดครึ้มซึ่งยังมีแสงสว่างอยู่บ้าง แต่ดวงอาทิตย์ไม่ได้ตกกระทบโดยตรงระหว่างสแกน
6. Losing Track (สาเหตุที่เกิดปัญหาของการหลุดกรอบการสแกน)
ยกตัวอย่างว่าคุณสแกนไปได้ครึ่งทางแล้ว แล้วคุณหยุดการสแกนชั่วคราวเพื่อปรับตำแหน่งของวัตถุสำหรับการสแกนที่เหลือ และเริ่มสแกนอีกครั้งเพื่อที่จะเก็บส่วนที่เหลือ แต่เครื่องสแกนจะสูญเสียการติดตามทันทีหรือที่เรียกว่า Tracking Lost เป็นเรื่องที่น่าหงุดหงิดแต่แก้ไขได้ง่ายเพียงแค่เริ่มการสแกนใหม่โดยให้เครื่องสแกนเล็งไปที่พื้นที่สแกนก่อนหน้านี้ง่ายๆก็คือ สแกนจากที่เดิมที่เคยสแกนติดไปแล้วก่อนหน้า คุณต้องทำเช่นนี้เพื่อให้เครื่องสแกนมีจุดอ้างอิง ไม่เช่นนั้นเครื่องจะไม่รู้ว่าเฟรมที่ถ่ายใหม่ควรไปที่ใด
7. The point distance setting is too high (ไม่ควรตั้งค่าระยะห่าง Point Clouds มากเกินไป)
เมื่อคุณทำการสแกนสำเร็จแล้ว แต่แบบโมเดลดูมีสีซีดและมีรายละเอียดเปื้อนหรือเศษเล็กๆน้อยๆ เยอะกินไป อะไรอาจเป็นปัญหา ผู้ผลิตโกหกเรื่องความถูกต้องหรือเปล่า คุณตั้งค่าระยะห่างของ Point Clouds มากเกินไปในระหว่างกระบวนการ Fusion หรือเรียกว่าปิดผิว และรายละเอียดเล็กๆ น้อยๆ ทั้งหมดก็หายไป นี่เป็นเพียงปัญหากับวัตถุที่มีรายละเอียดปลีกย่อยมากมาย หากต้องจัดการกับสิ่งที่มีพื้นผิวเรียบๆ ไร้รูปร่างเป็นส่วนใหญ่ การตั้งค่าระยะห่างของจุดให้เว้นระยะห่างให้กว้างขึ้นก็สามารถทำได้
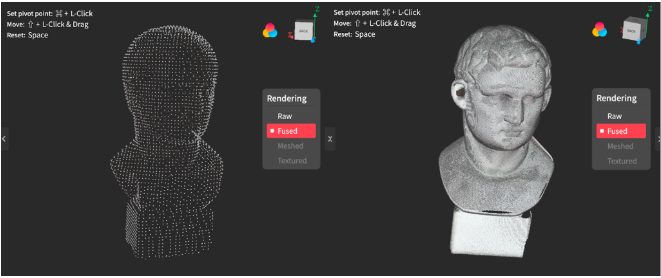
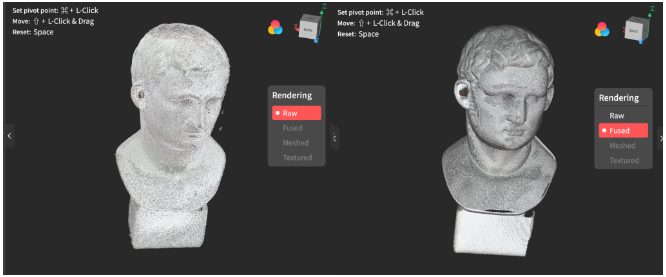
8. Not Fusing (ควรตั้งค่าจัดการ Point Clouds ก่อน Save File)
สำหรับบางคนที่สแกนชิ้นงานเสร็จแล้ว อาจจะดูว่าชิ้นงานทำไมเป็นจุดๆ เล็กๆน้อยๆ บางคนก็คิดว่าสแกนไม่ดี เครื่องสแกนไม่ละเอียดต่างๆ นาๆ ข้อนี้สำหรับมือใหม่หลังจากที่สแกนชิ้นงานเสร็จแล้วควรที่จะจัดการเลือกคำสั่ง Fusing ก่อนที่จะปิดผิวชิ้นงานเพราะว่าโปรแกรมจะจัดการเรียงระเบียบของ Poing Clouds ให้ใหม่ทั้งหมดก่อนที่จะสร้างผิวงานเพื่อให้ได้ผิวงานที่มีคุณภาพสูงสุด
9. Wrong Tool for the Job (เลือกใช้เครื่อง 3D Scanner ให้เหมาะสมกับชิ้นงาน)
การเลือกเครื่องสแกนแสงที่มีโครงสร้างต่างกันได้รับการออกแบบมาเพื่อสแกนวัตถุที่มีขนาดต่างกัน ดังนั้นการเลือกเครื่องสแกนที่เหมาะสมจึงจะได้คุณภาพของการสแกนที่ดีอย่างไม่ลำบาก สแกนได้ง่ายและรวดเร็ว ในกรณีของเครื่อง 3D Scanner รุ่น MINI สำหรับวัตถุขนาดเล็ก POP 3 สำหรับสิ่งของขนาดกลาง และ RANGE สำหรับสิ่งของขนาดใหญ่
แน่นอนว่าไม่ได้หมายความว่าเป็นไปไม่ได้ที่จะสแกนวัตถุที่มีขนาดแตกต่างจากสแกนเนอร์ที่ได้รับการปรับให้เหมาะสม แต่คุณจะต้องมีทักษะการสแกนมากมายเพื่อที่จะดึงออกมาได้ และจะต้องเข้าใจว่าหากลองสแกนเหรียญด้วย RANGE รายละเอียดเล็กๆ น้อยๆ จะขาดไปเมื่อเทียบกับการสแกนด้วย MINI
10. Unevenly Colored 3D Models (จัดการชิ้นงานให้มีสีและความเงาเท่ากันสม่ำเสมอก่อนสแกน)
การสแกนชิ้นงานอ้างอิงเฉดสีของโมเดล 3 มิติจะเปลี่ยนแปลงไปตามพื้นผิวของโมเดล เป็นผลมาจากการสแกนสีของวัตถุที่มีแสงสว่างไม่สม่ำเสมอ ซึ่งอาจมีเงาหนักบ้างในบางพื้นที่เมื่อสแกน สำหรับโมเดล 3 มิติที่มีสีสม่ำเสมอ ตรวจสอบให้แน่ใจว่ารายการได้รับแสงที่นุ่มนวลสม่ำเสมอ และไม่มีเงาที่ชัดเจนเฉพาะพื้นผิวของชิ้นงาน
Credit : Revopoint 3D


{kind=link}