

3DD Digital Fabrication ได้ทำการส่งสินค้าและติดตั้งพร้อมสอนการใช้งาน 3D Scanner รุ่น EinScan Pro 2X V2 3D Scanner ให้กับทาง บจ. คาลด์วิน ซึ่งเป็นผู้ผลิตสินค้า ชิ้นส่วนประดับยนต์ Accessories Car ใช้ในกระบวนการทำงาน Reverse Engineering ก่อนการผลิตชิ้นงานจริง ซึ่งความตั้งใจใช้ในการลดต้นทุนเวลาในการเขียนแบบชิ้นงานตั้งแต่กระบวนการเริ่มแรก
Author: KORND
ขอบคุณ : บจ. ไทย สปอร์ต ยูไนเต็ด ผู้ผลิตเสื้อและกางเกงมวย / Ray 9 Laser Cutter & Engraving

3DD Digital Fabrication ได้ทำการส่งสินค้าและติดตั้งพร้อมสอนการใช้งาน Laser รุ่น Ray 9 Laser Cutting & Engraving ให้กับทาง บจ. ไทย สปอร์ต ยูไนเต็ด ซึ่งเป็นผู้ผลิตสินค้า เสื้อผ้า กางเกงเกี่ยวกับ กีฬามวย เพื่อใช้ในการตัดผ้าตามลายตัวภาพและอักษรที่ต้องการได้อย่างสวยงามและรวดเร็ว สำหรัสินค้าที่ส่งมอบและติดตั้งทั้งหมดจะมีรายละเอียดดังนี้ครับ Ray9 :
ขอบคุณ : คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีราชมงคลสุวรรณภูมิ ศูนย์นนทบุรี เขตเหนือ / FDM 3D Printer , Laser

3DD Digital Fabrication ได้ทำการส่งมอบสินค้า FDM3D Printer , และ Laser ให้กับทาง คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีราชมงคลสุวรรณภูมิ ศูนย์นนทบุรี เขตเหนือ ซึ่งมหาวิทยาลัยแห่งนี้มีความโดดเด่นในสายของวิศวกรรมศาสตร์เป็นหลัก และทางเรา 3DD Digital Fabrication ได้เป็นผู้จำหน่ายครุภัณฑ์สำหรับวิจัยและพัฒนาการศึกษา เพื่อส่งเสริมคุณภาพการศึกษาภายในประเทศไทยให้ดียิ่งขึ้น และเพื่อช่วยให้ต่อยอดในอนาคตที่สามารถทำงานได้ง่ายขึ้นรวมถึงการพัฒนางานวิจัยใหม่ๆเข้ามาเกี่ยวข้อง สำหรับอุปกรณ์ทั้งหมดจะมีรายละเอียดดังนี้ครับ Ray13 Metal
3D Scanner สร้างแผนภาพแบบ 3 มิติ ช่วยในการสื่อสารกันระหว่าง ศัลยแพทย์และนักพยาธิวิทยาในการผ่าตัดเนื้อเยื่อ

สาขาการผ่าตัดมะเร็ง การรักษาขอบเขตในการผ่าตัดให้ชัดเจนเป็นงานที่ซับซ้อนและท้าทายสำหรับศัลยแพทย์ สถานะของขอบเขตการผ่าตัดถือเป็นปัจจัยเสี่ยงทางพยาธิวิทยาที่สำคัญที่สุด เพื่อให้ทุกอย่างเป็นไปตามเป้าหมายในการกำจัดเนื้องอกที่เป็นเนื้อร้าย ออกให้หมดให้อยู่ในขอบเขตการผ่าตัดที่ชัดเจน ในขณะที่รักษาโครงสร้างปกติของเนื้อเยื่อที่ไม่ได้เสียหาย ให้เกิดผลกระทบต่อการผ่าตัดน้อยที่สุด ศัลยแพทย์และนักพยาธิวิทยาจึงมักใช้การประเมินขอบเขตระหว่างการผ่าตัดโดยใช้การวิเคราะห์การตัดด้วยความเย็น (FSA) อย่างไรก็ตาม วิธีการประเมินแบบเดิมมักต้องให้ศัลยแพทย์จำเป็นต้องเข้าๆออกๆ จากห้องผ่าตัดซึ่งทำให้เสียเวลา และไม่ปลอดเชื้อก่อนการผ่าตัดเพื่อปรึกษากับนักพยาธิวิทยา และหลังจากที่ปรึกษาเสร็จจึงจะต้องเริ่มขั้นตอนการผ่าตัดใหม่ ซึ่งอาจไม่สะดวกและใช้เวลานาน Micheal กล่าวถึง ความตระหนักในความจำเป็นในการปรับปรุงการสื่อสารระหว่างนักพยาธิวิทยาและศัลยแพทย์ในระหว่างการผ่าตัด เขาทำงานเป็นผู้ช่วยศาสตราจารย์ที่ แผนกโสต ศอ นาสิกวิทยา ของศูนย์การแพทย์มหาวิทยาลัย Vanderbilt
กระปุกออมสิน หมูเด้ง !!! ขึ้นรูปด้วย SLA 3D Printer

กระแสช่วงนี้ของน้องหมูเด้ง !!! และเครื่องพิมพ์ 3 มิติระบบ SLA 3D Printer Industrial กำลังมาแรงในงานอุตสาหกรรม และ ระบบการศึกษาในระดับมหาวิทยาลัยทางเรา 3DD Digital Fabrication จึงได้นำกระแสทุกอย่างประกอบเข้าด้วยกันจึงได้ใช้เครื่องพิมพ์ระบบเรซิ่นความละเอียดสูงรุ่น Ray 800 SLA ในการพิมพ์งานหมูเด้ง เพื่อเกาะกระแสกันหน่อย ในวันนี้ทางเราจะมาใช้งานเครื่อง พิมพ์งานน้องหมูเด้ง เพื่อแจกจ่ายกันในองค์กร และในการทำครั้งนี้จะไม่ใช่แค่เพียงตั้งโชว์
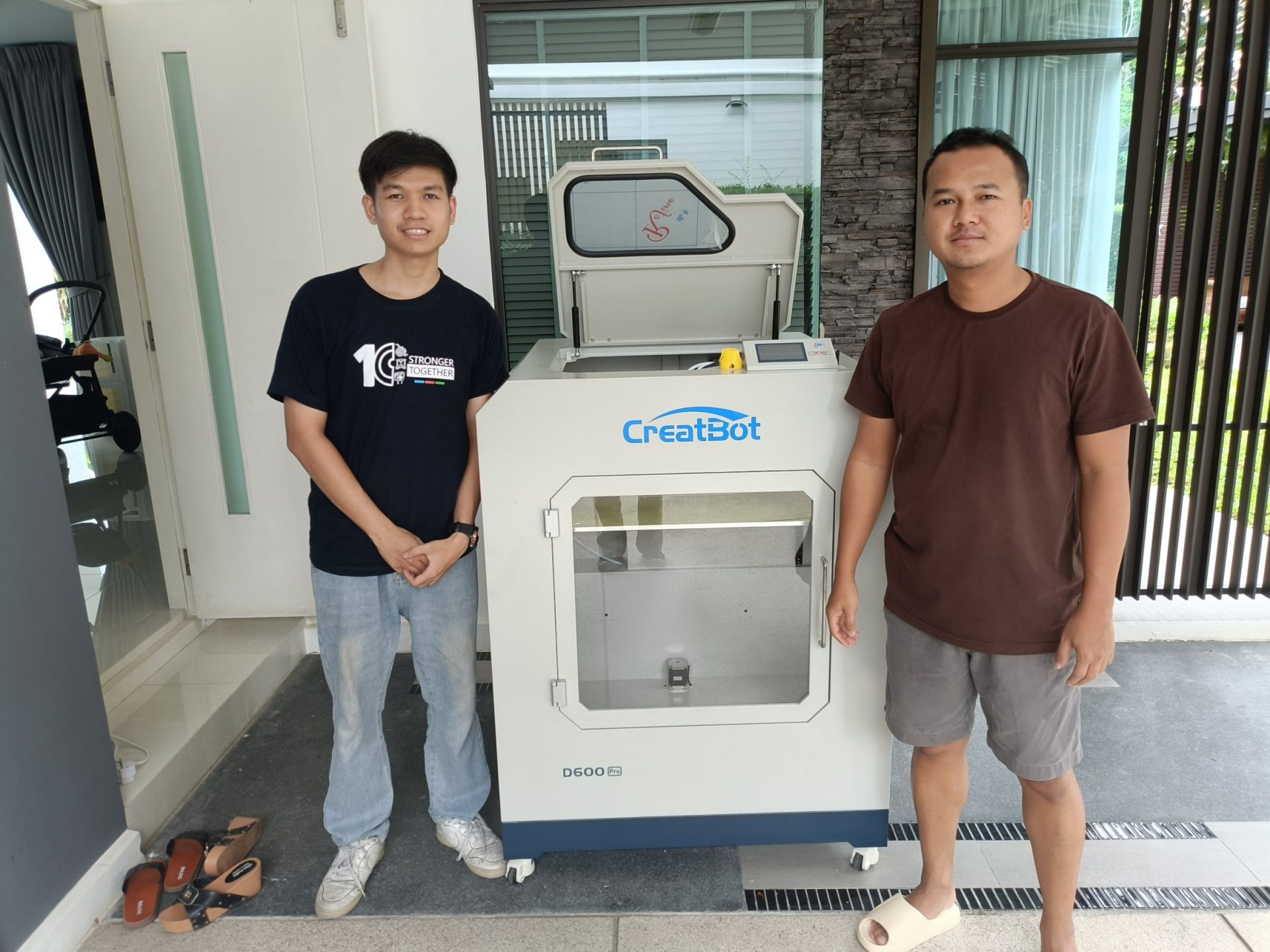
ขอบคุณ : คณะวิทยาศาสตร์ มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี FDM 3D Printer , SLA 3D Printer , 3D Scanner ,Laser

3DD Digital Fabrication ได้ทำการส่งมอบสินค้า FDM3D Printer , SLA 3D Printer , 3D Scanner และ Laser ให้กับทาง คณะวิทยาศาสตร์ มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี หรือ FSCI KMUTT นั้นเอง พระจอมเกล้าธนบุรี (บางมด) นั้นมีความโดดเด่นในสายของ
ขอบคุณ : คณะแพทย์ศาสตร์ กายวิภาคศาสตร์ มหาวิทยาลัยศรีนครินทรวิโรฒ 3D Scanner , SLA 3D Printer , Laser

3DD Digital Fabrication ได้ทำการส่งมอบสินค้า 3D Printer , 3D Scanner และ Laser ให้กับทาง คณะแพทย์ศาสตร์ อาคาร กายวิภาคศาสตร์ มหาวิทยาลัยศรีนครินทรวิโรฒ หรือ คณะแพทย์ มศว. นั้นเอง ซึ่งเป็นที่รู้จักกันในประเทศว่าเป็นคณะแพทย์มหาวิทยาลัยชื่อดัง ทางเราได้เป็นผู้จำหน่าย อุปกรณ์สำหรับใช้งานด้านการวิจัยทางการแพทย์ และ งานด้านการศึกษาสำหรับนักศึกษาแพทย์
ขอขอบคุณ หจก. ยากีย่า เอสเซสเซอร์รี่ กับ FDM 3D Printer , 3D Scanner , Laser ใช้งานในอุตสาหกรรม

3DD Digital Fabrication ได้ทำการส่งมอบสินค้า 3D Printer , 3D Scanner และ Laser ให้กับทาง ห้างหุ้นส่วนจำกัด ยากีย่า เอสเซสเซอร์รี่ ซึ่งเป็นบริษัทที่เป็นผู้ ผลิต จำหน่าย อุปกรณ์งานจราจร และสินค้าอื่นๆอีกมากมายซึ่งเราได้ทำการจัดส่ง พร้อมทั้งสอนการใช้งานอย่างเต็มรูปแบบ โดยทีมงานช่างมืออาชีพ ที่ได้รับการอบรมโดยเฉพาะ 3DD Digital
ขอขอบคุณ SIICO Technologies Cambodia กับ 3D Printer Large Size พิมพ์ได้ใหญ่ เหมาะกับหลายอุตสาหกรรม

เมื่อไม่นานนี้ 3DD ได้ทำการส่งมอบสินค้า 3D Printer ขนาดใหญ่ FullScale Max 660 Pro ให้กับทาง SIICO Technologies Cambodia ซึ่งเป็นบริษัทที่กำลังจะจดทะเบียนในประเทศไทย เพื่อนำไปพัฒนางาน กล่องเก็บของที่ใช้ในโรงงานอุตสาหกรรม ซึ่งเราได้ทำการตรวจสอบเครื่องก่อนทำการจัดส่ง พร้อมทั้งสอนการใช้งานอย่างเต็มรูปแบบ โดยทีมงานช่างมืออาชีพ ที่ได้รับการอบรมโดยเฉพาะ 3DD Digital Fabrication นอกจากการจัดส่งที่รวดเร็วแล้ว เรายังมีการเทรนนิ่ง
ขอบคุณ: บจ. บางใหญ่วัตถุมงคล กับ Einscan Pro 2X V2

เมื่อไม่นานมานี้ได้มีการติดต่อ จากทาง บจ. บางใหญ่วัตถุมงคล เกี่ยวกับความต้องการจะทำ 3D Scanner เพื่อนำไปใช้งานต่อ และสำหรับการงานประติมากรรมทางด้านพระ ให้เข้ากับยุคสมัยใหม่ โดยต้องการให้ทาง 3DD Digital Fabrication นำส่งเครื่องสแกนเนอร์ 3มิติ Einscan Pro2x V2 พร้อมสอนการใช้งาน ให้ตรงกับความต้องการการทำงานในสมัยใหม่นี้ หลังจากที่ พวกเรา 3DD ได้รับการติดต่อจากทางมหาวิทยาลัย
3D Scanner : EinScan H2 ช่วยในการปรับแต่งหมวกกันน็อคสำหรับ กระดูกกะโหลกศีรษะของเด็ก

หมวกกันน็อคแบบ Orthotic มีความสำคัญอย่างยิ่งสำหรับทารกบางคนในการแก้ไขภาวะกระดูกผิดรูปในรูปแบบต่างๆ เช่น ศีรษะไม่สมส่วนและกะโหลกศีรษะปิด หมวกกันน็อคเหล่านี้จำเป็นต้องทำขึ้นเป็นพิเศษเพื่อให้พอดีกับทารกแต่ละคนที่มีรูปแบบกระโหลกไม่เหมือนกัน ซึ่งจำเป็นต้องวัดศีรษะของทารกอย่างแม่นยำ โดยทั่วไปแล้ว AC Medical จะวัดศีรษะของทารกด้วยการสแกน CT แบบเอกซเรย์ อย่างไรก็ตาม วิธีนี้มีราคาแพงและไม่สะดวก โชคดีที่ AC Medical ได้เปิดตัวเครื่องสแกนเนอร์ 3 มิติ รุ่น EinScan H2 ซึ่งเป็นโซลูชันที่รวดเร็ว
ภาพชิ้นงาน 3 มิติจดสิทธิบัตรโดยใช้ 3D Scanner SHINING 3D สำหรับรองเท้าบู๊ต 2×4 ของ MSCHF’s

ในโลกของการออกแบบที่เปลี่ยนแปลงอย่างรวดเร็ว ความแม่นยำและนวัตกรรมถือเป็นสิ่งสำคัญที่สุด กรณีศึกษานี้จะสำรวจว่า Damani ซึ่งเป็นแบรนด์แอมบาสเดอร์ของ SHINING 3D ช่วยเหลือทีม MSCHF ในการสร้างภาพวาด 3 มิติสิทธิบัตรด้วยการสแกนสำหรับนวัตกรรมรองเท้าล่าสุดของพวกเขา ซึ่งก็คือ 2×4 Boot ได้อย่างไร MSCHF รองเท้าบู๊ต 2×4 MSCHF เป็นกลุ่มศิลปินแนวหน้าที่มีชื่อเสียงในด้านการเปิดตัวผลิตภัณฑ์ที่เร้าใจและได้รับความนิยมอย่างรวดเร็ว ผลงานล่าสุดของพวกเขาคือ 2×4 Boot ซึ่งเป็นการนำรองเท้า
ขอขอบคุณ : บริษัท ศรีโพธิ์ทองเมตัลเวิร์ค จำกัด ผู้ผลิตเครื่องสูบและเครื่องอัด เครื่องปั๊มน้ำและอุปกรณ์ กับ 3D Printer SLA ที่ละเอียดที่สุด

บริษัท ศรีโพธิ์ทองเมตัลเวิร์ค จำกัด หรือ TAKI PUMP เป็นผู้ผลิตเครื่องสูบและเครื่องอัด เครื่องปั๊มน้ำและอุปกรณ์ โดยมีทีมพัฒนาและออกแบบของตัวเอง ทำให้มีความต้องการออกแบบ 3D พร้อมกับการพิมพ์ทดสอบ รวมถึงการทำต้นแบบ จึงได้ทำการติดต่อพวกเรา 3DD ในการช่วยเติมเต็มในส่วนนั้น โดยให้โจทย์พวกเรามาโดยเน้นที่ความละเอียดเนื่องจากงานที่ทำจะมีส่วนที่เล็กและงานสวยงามอย่างมาก เพื่อให้แบบที่ออกแบบมาใช้งานได้ดี เราจึงได้นำเสนอ 3D Solution พิเศษๆ เพื่องานวิศวกรรมออกแบบ Design ในรูปแบบงานทางวิศวกรรมต่างๆกับเครื่อง
ขอขอบคุณลูกค้า บริษัท เมเจอร์ ซิลเวอร์ จำกัด กับ Ray Mark 30E Station

3DD Digital Fabrication ได้ทำการจัดส่งถึงบริษัท ซึ่งเป็นเครื่อง Laser คือ Ray Mark 30E Station สามารถเคลื่อนที่เลเซอร์ได้เร็วโดย Mirror galvanometer มีการแสดงกรอบการทำงานก่อนการแกะสลัก ทำให้เหมาะกับการแกะสลักชิ้นงานที่มีขนาดกลางไปถึงขนาดใหญ่ พื้นที่การทำงาน 110*110 mm สามารถแกะสลักพื้นผิวโลหะชนิดต่างๆได้ เช่น เหล็ก, อลูมิเนียม, ทองเหลือง, ทองแดง, โลหะมีค่าชนิดต่างๆ รวมถึงอโลหะเช่น
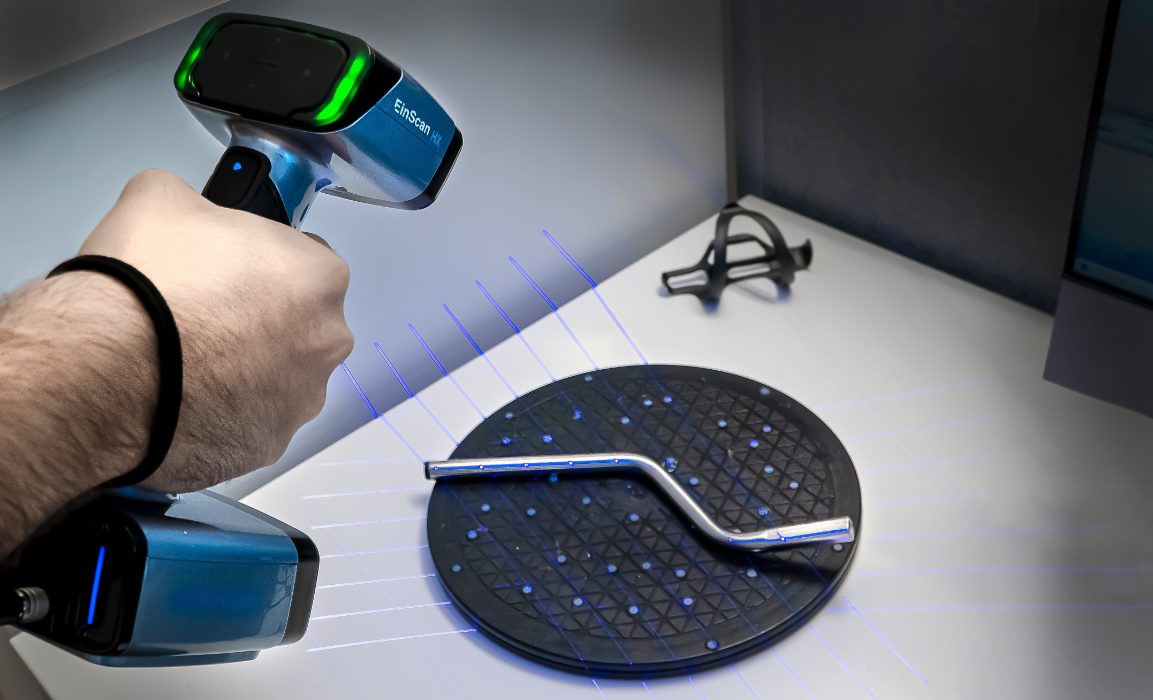
3D Scanner ใช้ตรวจสอบประสิทธิภาพใบพัดเรือ ที่มีคุณภาพสูงและประหยัดเวลา

บทความนี้มุ่งเน้นไปที่โซลูชันการแสกนแบบ 3 มิติ โดยใช้ 3D Scanner สำหรับการตรวจสอบใบพัดเรือ ตามปกติแล้ว ผู้ตรวจสอบจะใช้ Pitchometer เพื่อบันทึกข้อมูลการตรวจสอบ อย่างไรก็ตาม วิธีการนี้มีข้อจำกัดที่สำคัญซึ่งทำให้กระบวนการตรวจสอบยุ่งยาก เมื่อเครื่องมือปฏิวัติวงการอย่างเครื่องสแกน 3 มิติ EinScan HX เกิดขึ้น การตรวจสอบใบพัดจึงกลายเป็นเรื่องง่ายและมีประสิทธิภาพ ความสำคัญของการตรวจสอบใบพัด ใบพัดเป็นหัวใจของเรือที่ขับเคลื่อนการเคลื่อนที่ผ่านน้ำได้อย่างมีประสิทธิภาพ ความไม่สมบูรณ์หรือความเสียหายต่อใบพัดอาจส่งผลกระทบอย่างมีนัยสำคัญต่อความเร็ว ประสิทธิภาพการใช้เชื้อเพลิง
เลือกใช้งาน 3D Scanner ให้เหมาะกับการทำงานของคุณ ง่ายๆเพียงแค่คลิกเมาส์ไม่กี่ครั้ง!!

สวัสดีครับทุกๆท่าน วันนี้เรา 3DD Digital Fabrication ได้มาแชร์ Website ของทาง SHINNING 3D ซึ่งเป็นหน้าเว๊บไซต์ที่จะช่วยให้เราสามารถพิจรณาการเลือก 3D Scanner ให้เหมาะกับผู้ที่สนใจจะใช้งานเพียงแค่การเลือกข้อมูลคล้ายๆกับการทำแบบสอบถามทั่วไปโดยที่ข้อมูลทั้งหมดทาง SHINNING 3D ได้มีการวิจัยข้อมูลเชิงลึกของผู้ใช้ทั่วโลกมาเป็นแบบสอบถามนี้ โดยคอนเซปนี้จะเป็นหัวข้อที่ชื่อว่า เลือกใช้งาน 3D Scanner ให้เหมาะกับการทำงานของคุณ ง่ายๆเพียงแค่คลิกเมาส์ไม่กี่ครั้ง!! หากว่าคุณกำลังมองหาโซลูชันที่ครอบคลุมเกี่ยวกับการทำงาน 3
SHINING 3D คิดค้นและมุ่งมั่นเพื่อสร้างกระบวนการปั้นกะโหลกขั้นสูงทางการแพทย์

หางโจว จีน – 23 กุมภาพันธ์ 2567: SHINING 3D ผู้ให้บริการและผู้ผลิตชั้นนำระดับโลกด้านเทคโนโลยีดิจิทัล 3 มิติ หรือ เครื่องสแกนเนอร์ 3 มิติ (3D Scanner) รู้สึกตื่นเต้นที่จะประกาศความร่วมมือกับ Invent Medical ผู้ให้บริการชั้นนำระดับโลกด้านผลิตภัณฑ์อุปกรณ์ทางการแพทย์และขาเทียมที่พิมพ์ด้วย 3 มิติสำหรับผู้ป่วยโดยเฉพาะ การทำงานร่วมกันอย่างใกล้ชิด ทำให้เกิดกระบวนการการสแกน
อัพเกรดรถมอเตอร์ไซค์ด้วย Workflow : 3D Scan – 3D Design – 3D Print

ด้วยเทคโนโลยี 3D อุปกรณ์ที่ยอดเยี่ยมได้ถือกำเนิดขึ้นในความเป็นจริงโดย นักออกแบบมืออาชีพ และวิศวกรทั่วโลก ในฐานะบริษัทที่มุ่งมั่นสู่ความเป็นเลิศในภาคส่วนการสแกน 3 มิติ การออกแบบ และการพิมพ์ 3 มิติ ด้วย 3D SCanner – 3D Printer เรามุ่งหวังที่จะสร้างแรงบันดาลใจให้กับคุณด้วยไอเดียสุดพิเศษมากมาย ซึ่งคุณก็สามารถใช้เพื่อยกระดับชีวิตประจำวันของวงการ 3 มิติ ได้อย่างมีประสิทธิภาพ ในกรณีปัจจุบัน เราจะตรวจสอบกระบวนการเปลี่ยนชิ้นส่วนอะไหล่มอเตอร์ไซค์
เปรียบเทียบการใช้งานระหว่าง 3D Scanner : EinScan SE – V2 & EinStar

EinScan-SE + Einstar : Solution สแกนเสริมสำหรับวัตถุทุกขนาด ด้วยความต้องการการสแกน 3 มิติที่เพิ่มขึ้นในอุตสาหกรรมต่างๆ ความต้องการเครื่องสแกนที่สามารถรองรับทั้งวัตถุที่มีขนาดเล็กและขนาดใหญ่จึงกลายเป็นคำถามที่พบบ่อย ว่าเราควรเลือกรุ่นใดแบบใดดีในขณะที่เรามีงบประมาณจำกัด คุณกำลังมองหาวิธีแก้ปัญหาดังกล่าวอยู่หรือไม่ ไม่ต้องไปไกลด้วยการผสมผสานของผู้ผลิตอย่าง SHINNING3D ที่ได้เขียนบทความแนะนำเกี่ยวกับการใช้งานในครั้งนี้ด้วยการแนะนำ 3D Scanner ที่ตอบโจทย์ในหลากหลายด้านธุรกิจอย่าง EinScan-SE – V2 และ Einstar เครื่องสแกนทั้งสองเครื่องนี้ทำงานร่วมกันได้อย่างราบรื่นเพื่อให้คุณสแกนงานวัตถุทุกขนาดเพื่อให้ได้คุณภาพงานทีดีที่ได้อย่างยอดเยี่ยม
EinStar Handle Lock ไฟล์ฟรี ดาวน์โหลดได้เลยจาก Thingiverse

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
สวัสดีครับทุกท่านวันนี้ 3DD Digital Fabrication มาแชร์ไฟล์ 3D ดีดี ในเว๊บไซต์ของ Thingiverse สำหรับผู้ที่มี 3D Scanner รุ่น EinStar กันครับ เนื่องจากว่า EinStar เป็นเครื่อง 3D Scanner ที่จับค่อนข้างยากและไม่ค่อยจะถนัดมืออยู่แล้ว จึงมีผู้ออกแบบไฟล์งาน 3D สำหรับมือจับเครื่อง 3D